
Page 181 - 《振动工程学报》2026年第5期
P. 181
第 5 期 高晓建,等:基于滑动包络中值的趋势项提取及其在位移反演中的应用 1385
1.2 响算法的时间效率 T c ,S d 值的设置越大算法的时间
模型1
0.9
模型2 效率越高。综上分析,将 S d 的数值设置为 0.2~0.4 时,
e p 0.6
可兼顾 SEM 算法提取趋势项的准确性和效率。
0.3
0 3.4 数值模型验证
0 400 800 1200 1600 2000
W
为验证 SEM 算法提取趋势项的准确性,以线性
图 8 不同 W 设置下的评价指标 e p 值
层 剪 切 模 型 的 工况 2 和 非 线 性 层 剪 切 模 型 的 工 况
Fig. 8 Evaluation index e p values under different W settings
17 为例,取第 2 自由度的加速度响应信号,添加噪/信
由图 8 可知,模型 1 和模型 2 分别对应的 5 种工 比值为 2.5 的白噪声,用于模拟常见的测量噪声导致
况中 e p 值 随 W 值 的 变 化 曲 线 几 乎 重 合 , 表 明 参 数 的趋势项。对添加白噪声后的加速度响应进行频谱
W 值的设置与响应信号的频率特性相关。信号的频 分析,并进行两次时域积分,相关结果分别如图 11
率特性反映了信号在单位时间内往复振动的次数。 和 12 所示。
频率越高,固定时间内的信号峰值越多,则需要拾取
−1
×10 ×10 −2
的 包 络 值 点 也 就 越 多, 因 此 应 设 置 较 小 的 W 值 和 8 6 0.80 Hz
S d 值。响应信号基频的能量通常占据信号频谱的绝 4 4
大部分,不妨以响应信号的基频 f 为其频率特性参 加速度 / (m·s −2 ) 0 幅值 / (m·s −2 ·Hz −1 ) 2
数,将图 8 中的横坐标转换为基频 f 与 W 值的乘积 −4 0
−8
30
4
6
20
f·W,结果如图 9 所示。 0 10 时间 / s 40 50 0 2 频率 / Hz 8 10
1.2 ×10 ×10 1
−2
8 3
0.9
模型2 4 2
e p 0.6 模型1 速度 / (m·s −1 ) 0 位移 / mm 1
0.3 −4 0
0
0 400 800 1200 1600 2000 −8 0 10 20 30 40 50 −1 0 10 20 30 40 50
f·W 时间 / s 时间 / s
图 9 不同 f·W 下的评价指标 e p 值
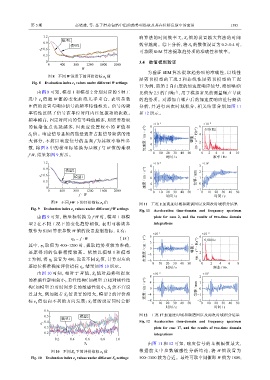
图 11 工况 2 加速度时域和频谱图以及两次时域积分结果
Fig. 9 Evaluation index e p values under different f·W settings
Fig. 11 Acceleration time-domain and frequency spectrum
由图 9 可知,横坐标转换为 f·W 时,模型 1 和模 plots for case 2, and the results of two-time domain
型 2 在不同工况下的变化趋势相似,表明可将该参 integrations
数作为 SEM 算法参数 W 值的设置控制指标,且有:
×10 −1 ×10 −2
η 2 = f ·W (15) 6 0.80 Hz
其中,η 2 取值为 400~1200 时,提取趋势项较为准确, 3 0 (m·s −2 ·Hz −1 ) 6 4
还 原 得 到 的 位 移 精 度 较 高 。 依 然 以 模型 1 和 模 型 加速度 / ( m·s −2 ) −3 幅值 / 2
2 为例,将 η 2 设置为 400,设置不同 S d 值,计算对应的 −6 0
0 10 20 30 40 50 0 2 4 6 8
还原位移准确度评价指标 e p ,结果如图 10 所示。 时间 / s 频率 / Hz
由图 10 可知,相对于 W 值,S d 值对趋势项提取 ×10 −2 ×10 1
8 2
的准确性影响较小;柔性结构(如模型 1)相对刚性结 4 1
构(如模型 2)对时间步长的敏感性较小;S d 值不宜设 速度 / (m·s −1 ) 0 位移 / mm 0
置过大,例如随着 S d 值设置的增大,模型 2 的评价指 −4 −1
标 e p 值也向不利的方向发展;S d 值的设置同时会影 −8 0 10 20 30 40 50 −2 0 10 20 30 40 50
时间 / s 时间 / s
0.6
图 12 工况 17 加速度时域和频谱图以及两次时域积分结果
0.5 模型2
模型1
e p 0.4 Fig. 12 Acceleration time-domain and frequency spectrum
0.3 plots for case 17, and the results of two-time domain
0.2 integrations
0.2 0.4 0.6 0.8 1.0
由图 和 可知,响应信号的基频幅值最大,
S d 11 12
图 10 不同 S d 下的评价指标 e p 值 根 据 前 文 中 参 数 敏 感 性 分 析 结 论, 将 W 值 设 置 为
Fig. 10 Evaluation index e p values under different S d settings 500~1500 较为合适。最终可取中间值即 W 值为 1000,