
Page 178 - 《振动工程学报》2026年第5期
P. 178
1382 振 动 工 程 学 报 第 39 卷
表 2 模拟信号频率变换底数和幅值折减系数设置 于 SEM 的趋势项提取方法(下文简称 SEM 算法)。
Tab. 2 Setting of frequency conversion base and amplitude 基本思路是引入“重叠移动时间窗”的理念,将一定
reduction coefficient for analog signals 长度的时间点作为一个时间窗 W,并设置不大于时
工况 N 1 /Hz N 2 /Hz N 3 /Hz A 1 /A 2 /A 3 间窗长度的移动步距 S d ,在每次移动的时间窗内寻
单频(M=1) 10 — — 1/0/0 找数据的最大值和最小值并分别储存于上包络序列
10 12 13 1/0.1/0.01 e u (t) 和下包络序列 e d (t)。在完成上、下包络值的拾
10 14 15 1/0.1/0.01
多频(M=3)
10 5 15 1/0.1/0.01 取之后,剔除 e u (t) 和 e d (t) 中的重复值,并通过线性插
10 2 15 1/0.1/0.01 值使其与原数据 x 0 (t) 长度相同。之后,计算中值序
列 z(t),将中值序列作为新的待处理数据 x(t),检验其
单频 10/12/13 10/14/15
0.16
10/5/15 10/2/15 与原数据 x 0 (t) 的平均差值是否满足预设阈值 H,不
0.02 满足时对 x(t) 进行与 x 0 (t) 相同的操作,直到多次求得
趋势项斜率 0.08 0.01 的中值序列变化不大于 H。可认为最后一次求得的
0.12
0
0.04
0 20 40 60 80 100 中值线即为趋势项,并最终完成趋势项分离。
0 在调整包络序列使其与原数据长度相同时,会
0 200 400 600 800 1000 遇到两种情况(即前端包络和尾端包络的情况),如
RSF
图 5 所示。
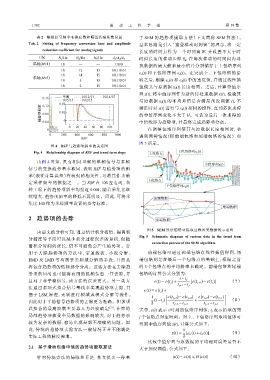
图 4 RSF 与趋势项斜率的关系图
Fig. 4 Relationship diagram of RSF and trend term slope 上包络点 上包络序列e u (t)
由图 4 可知,具有相同基频的单频信号与多频
中值序列z(t)
信号的变换趋势基本相同,表明 RSF 与趋势项的斜
率(表征计算误差)有较强的相关性,可将其作为确
下包络点
定采样频率的依据之一。当 RSF 在 100 左右时,各
下包络序列e d (t)
种工况下的趋势项斜率均接近 0.001,随着采集比继
续增大,趋势项斜率的降低不再明显。因此,可将采 前端数据
集比 100 作为采样频率设置的参考标准。
尾端数据
2 趋 势 项 的 去 除 前端数据
由前文的分析可知,通过估计积分初值、提高积 图 5 SEM 算法趋势项提取过程各类数据的示意图
Fig. 5 Schematic diagram of various data in the trend term
分精度等手段可以减少积分过程误差的累积,但随
extraction process of the SEM algorithm
着积分时间的延长,仍不可避免会产生趋势项。常
用 于 去 除 趋 势 项 的 方 法 中, 带 通 滤 波 、 小 波 分 解 、 前端包络可通过两端包络点线性插值得到,尾
EMD 及 LMD 等均属于类频域分解的手段,目的是 端包络则是在最后一个包络点的基础上,根据之前
将包含趋势项的低频部分分离。这些方法在去除趋 的 3 个包络点的平均斜率来确定。前端包络和尾端
势项的同时也可能将有用的低频信息一并去除,并 包络的计算公式分别为:
( )
且对于非平稳信号,该方法的误差更大。另一类方 e(t) = e t j + t −t j [ ( ) ( )] (7)
e t j+1 −e t j
t j+1 −t j
法通过多项式拟合信号基线来实现趋势项去除,其 ( )
e(t) = e t j +
基于 LSM 原理,无须进行频域或模式分解等操作, [ ( ) ( ) ( ) ( )]
1 ( ) e t j−3 −e t j−2 e t j−2 −e t j−1 (8)
因此对非平稳信号趋势项的去除更为准确。但多项 2 t −t j t j−3 −t j−2 + t j−2 −t j−1
式拟合的最高阶数主要靠人为经验确定 [21] ,计算的 式中,e(t) 表示 t 时刻的包络序列值;t j 表示拾取的第
局部趋势项值受全局数据的影响较大,对于趋势项 j 个包络点对应时刻。对上、下包络序列取均值即可
较为复杂的数据,容易出现局部不准确的问题。因 得到中值序列值 z(t),计算公式如下:
此,传统的趋势项去除方法一般情况下并不能满足 1
z(t) = [e u (t)+e d (t)] (9)
实际工程的精度需求。 2
比较中值序列与原数据的平均相对误差是否不
2.1 基于滑动包络中值的趋势项提取算法 大于预设阈值,公式如下:
针对传统方法的局限和不足,本文提出一种基 |z(t)− x(t)| ⩽ H |x(t)| (10)