
Page 164 - 《振动工程学报》2026年第5期
P. 164
1368 振 动 工 程 学 报 第 39 卷
{
network,FNN)的损失函数中。与传统数值方法依赖 τ f ′ = (x , x ) } N f ′ , τ i = (x , x ) } N i (8)
{
i
i
f
f
2j
1 j
1j
2 j
显式网格剖分和方程离散化不同,PINNs 通过构建 j=1 j=1
式中, N f ′ 为残差点集中的样本点个数;N i 为采样点
包含物理残差项的损失函数,将 PDE 求解过程转化
集中的样本点个数。
为深度学习中的优化问题。网络在训练阶段通过最
PINNs 的输出即系统状态向量 x(t)可以通过一个
小化物理约束损失与观测数据误差的加权组合,不
由可训练变量 θ参数化的神经网络 x(t,θ)来近似。由
仅能够学习到符合物理规律的近似解,还能在无显
于具有结构简单、易于微分、适配连续域问题等优点,
式离散化的条件下适应高维、复杂几何和稀疏数据
全连接前馈神经网络(fully-connected neural network,
场景。这一特性使 PINNs 在动力学响应预测、反问
FCNN)是 PINNs 的首选架构。可训练参数 θ = [W, b],
题求解及多物理场耦合分析等领域展现出显著优势。
[
]
其 中, W = W ,W ,··· ,W 和 b = b ,b ,··· ,b 分 别 为
[
]
L
2
2
1
1
L
为更全面地描述 PINNs 在预测问题求解中的应用,
权重矩阵和偏差向量。PINNs 的输入值在经过“隐
式 (6) 可扩展为如下更通用的常微分方程(ordinary
藏层”的神经元后会进行非线性变化,如下式所示:
differential equations,ODE)形式:
l
l
l
l
x = σ (W · x l−1 +b );l = 1,2,··· ,L (9)
2
d x 1 1
= f 1 (t, x)+ f d ,t ∈ [t 0 ,t f ]
l
式 中, x 为 该 层 的 输 出 值 , 也 是 下 一 层 的 输 入 值 ;
dt m
2
(7)
dx 2 l
σ 为非线性激活函数 tanh,其形式为:
= f 2 (t, x),t ∈ [t 0 ,t f ]
dt
x −x
e −e
。
x(t 0 ) = x 0 tanh(x) =
x
e +e −x
其中: 本文中,损失函数构成为:
( ) 2
C x 2
(10)
f 1 (t, x) = − +g L(θ,τ) = w f L ODE +w i L data
m x 1 ,
式中, L ODE 和 L data 分别为 ODE 损失项和数据驱动损
˙ x 1 x 2 Rx 1 x 2 x 1
f 2 (t, x) = − + u
x 1 2C 2C 失项; w f 和 w i 为这些损失的权重,用于平衡各项损失。
;
式 中, x(t)为 系 统 状 态 向 量 , x(t) = [x 1 (t), x 2 (t)] x 0 (t 0 ) 通过最小化损失函数,可以得到神经网络的最
;
为初始状态向量, x 0 (t 0 ) = [x 1 (t 0 ), x 2 (t 0 )] t 0 和 分别为 优参数:
t f
时间区间的初始时刻和终止时刻。由于 PINNs 是确 θ = argmin L(θ,τ) (11)
∗
定性框架,无法处理随机性,这里设定 f d = 0。
PINNs 包 括 输 入 层 、 隐 藏 层 与 输 出 层 三 部 分 。 3 基 于 B-PINNs 的 动 力 学 响 应 预 测
其中输入层负责接收模型训练所需的原始数据;隐
藏层的层数可根据需求设置,每层包含若干神经元, B-PINNs 通过有机整合物理约束、观测数据及
用于对上一层传来的信息进行非线性处理;最终,输 不确定性量化方法,实现对系统动力学行为的高效
出层负责输出隐藏层的运算结果。 建模与准确预测。此策略不仅提升了模型的预测精
在 PINNs 的训练过程中,输入层接收来自不同 度和鲁棒性,同时能够对预测结果的置信度进行量
类型训练点集的坐标信息。本文中的训练点集包括 化,为悬浮系统在复杂工况下的性能评估与风险管
包含 N f ′ 个数据点的残差点集 τ f ′ 和包含 N i 个数据点 理提供了坚实的理论基础和技术保障。
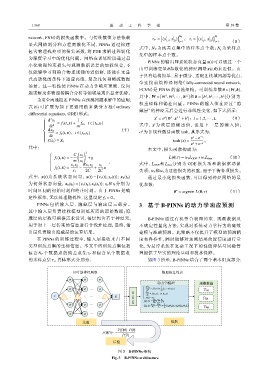
的采样点集 τ i ,具体形式分别为: 如图 3 所示,B-PINNs 结合了两个基本组成部分:
贝叶斯神经网络 物理信息约束
σ σ ... σ
动力学模型 观测数据
σ σ ... σ x(t)
x
t ... ... ... ... x x
f 1 (t, x)=− Lx 1 x 2 x 1 2 +g f(t)
2m
σ σ ... σ x · x 1 x 2 − Rx 2 + 1 [u 0 +k 1 (x 1 −x 0 )+k 2 x 1 +k 3 x 1 ]
··
·
f 2 (t, x)= x 1 L L b(t)
σ σ ... σ
先验 似然
P( |θ)=P(θ)
P(θ| )=
P( )
后验
图 3 B-PINNs 架构
Fig. 3 B-PINNs architecture