
Page 169 - 《振动工程学报》2026年第5期
P. 169
第 5 期 倪 菲,等:物理信息机器学习驱动的高速磁浮列车悬浮系统动力学响应预测 1373
表 2 不同强度测量噪声条件下基于不同方法的气隙和电流的拟合误差和预测误差
Tab. 2 Fitting errors and prediction errors of levitation gap and current based on different methods under different intensity
measurement noise
气隙 电流
σ 方法
拟合误差 预测误差 拟合误差 预测误差
① 9.98×10 −3 3.88×10 −6 8.18×10 −3 2.18×10 −5
A ② 2.77×10 −3 5.58×10 −4 3.42×10 −3 1.78×10 −4
③ 9.61×10 −3 1.07×10 −3 9.36×10 −3 7.22×10 −4
① 8.32×10 −3 8.60×10 −6 6.91×10 −3 2.75×10 −5
B ② 7.13×10 −3 1.22×10 −3 7.48×10 −3 4.26×10 −4
③ 9.62×10 −3 9.70×10 −4 9.37×10 −3 7.23×10 −4
① 9.66×10 −3 3.66×10 −7 9.07×10 −3 1.06×10 −4
C ② 8.62×10 −3 9.17×10 −4 8.76×10 −3 1.27×10 −3
③ 9.55×10 −3 5.46×10 −4 9.42×10 −3 7.33×10 −4
−4
−5
−5
注:A、B和C分别表示测量噪声强度为4.0×10 、8.0×10 和1.6×10 ;①、②和③分别表示预测方法为PINNs、B-PINNs-HMC和B-PINNs-VI。
整体上,PINNs 和 B-PINNs 的短时预测都具有可
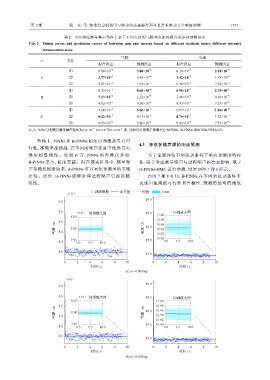
4.3 考虑多噪声源的响应预测
行性,准确率都很高,在不同的噪声强度下依然具有
很 好 的 鲁 棒 性 。 比 较 而 言, PINNs 的 预 测 误 差 较 为了全面评估不同扰动条件下响应预测的鲁棒
B-PINNs 更小,精度更高。但在现实世界中,测量噪 性,综合考虑测量噪声与过程噪声的叠加影响,基于
声等随机因素较多,B-PINNs 可以量化预测量的不确 B-PINNs-HMC 进行预测,结果如图 7 和 8 所示。
定性。此外,B-PINNs 能够处理过程噪声引起的随 由图 7 和 8 可知,B-PINNs 在不同的扰动条件下
机性。 表现出很高的可行性和鲁棒性,预测值的均值曲线
训练数据 真实值 均值 2 stds
×10 −3
19.0
9.0
8.8 ×10 −3 局部放大图 18.5 局部放大图
8.05 17.00
16.98
8.6
气隙 / m 8.4 8.00 电流 / A 18.0 16.96
16.94
16.92
16.90
7.95 17.5
8.2 9.0 9.5 10.0 9.0 9.5 10.0
8.0
17.0
0 2 4 6 8 10 0 2 4 6 8 10
时间 / s 时间 / s
(a) σ f =0.001mg
×10 −3
19.0
9.0
8.8 ×10 −3 局部放大图 18.5 局部放大图
8.05 17.00
8.6 16.98
气隙 / m 8.4 8.00 气隙 / m 18.0 16.96
16.94
16.92
7.95 17.5 16.90
8.2 9.0 9.5 10.0 9.0 9.5 10.0
8.0
17.0
0 2 4 6 8 10 0 2 4 6 8 10
时间 / s 时间 / s
(b) σ f =0.002mg
−3
−3 局部放大图 局部放大图
气隙 电流
时间 时间
σ