
Page 167 - 《振动工程学报》2025年第11期
P. 167
第 11 期 徐俊起,等:具有粒子群-禁忌搜索算法的高速磁浮悬浮系统加速度反馈控制 2625
适应度函数下寻找到较好解,在其后期收敛后引入 b. PSO 算法阶段。根据式 (12)~(15) 更新粒子速
禁 忌 搜 索, 使 其 能 够 跳 出 局 部 最 优 在 全 局 搜 索 更 度与位置,并根据式 (16)~(20) 计算粒子适应度,得到
优解。 个体最优与全局最优;
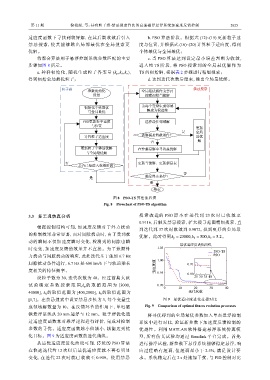
将混合算法用于悬浮控制系统参数匹配的主要 c. 当 PSO 算法达到设定最小误差判断为收敛,
步骤如图 8 所示。 进入纯 TS 阶段,将 PSO 搜索到的全局最优解作为
a. 种群初始化,随机生成粒子各变量 ( k p ,k d ,k a ), TS 的初始解,根据表 2 步骤进行精细搜索;
得到初始全局最优粒子; d. 达到迭代次数后结束,输出全局最优解。
粒子群 参数初始化 全局最优解作为禁忌 禁忌搜索
设置 搜索初始当前解
为每个变量生成邻域
初始化个体最优
与全局最优 解成为候选集
PSO更新粒子速度 选择最佳邻域解
与位置
更新
是 全局
该解满足特赦条件?
计算粒子适应度 最优
否 解
更新粒子个体最优解 在非禁忌解中寻找最优解
与全局最优解
否 更新当前解、更新禁忌表
是否已经进入收敛阶段?
否
满足终止条件?
是
是
结束
图 8 PSO-TS 算法流程图
Fig. 8 Flowchart of PSO-TS algorithm
3.3 多工况仿真分析 搜 索 改 进的 PSO 原 本 在 迭 代 到 23 次 时 已 收 敛 至
0.9116,后触发禁忌搜索,扩大搜寻范围精细搜索,直
根据控制结构可知,加速度反馈对于外力扰动
到迭代到 37 次时收敛到 0.9072,找到更好的全局最
的抑制效果非常显著,面对间隙扰动时,由于受到扰
优解。此时得到 k p = 23800,k d = 500,k a = 5.2。
动的瞬间不仅加速度瞬时变化,检测到的间隙也瞬
最优适应度进化曲线
时变化,加速度反馈的效果并不直接。为了兼顾外 1.05
PSO-TS
力扰动与间隙扰动的响应,此处迭代基于施加 6.7 Hz PSO
间隙扰动条件进行,6.7 Hz 是 600 km/h 下与轨道梁长 适应度值 1.00 0.91
度相关的特征频率。 0.95
设粒子数为 30,迭代次数为 40。经过前期大致 0.90 25 30 35 40
试 验 确 定 参 数 搜 索 范 围, k p 的 取 值 范 围 为 [3000, 0.90
0 10 20 30 40
40000], k d 的取值范围为 [400,2000], k a 的取值范围为 迭代次数
[1,7]。在禁忌搜索中设置禁忌步长为 3,每个变量生 图 9 最优适应度进化过程对比
成领域解数量为 10。在反馈环节的作用下,单电磁 Fig. 9 Comparison of optimal fitness evolution processes
铁悬浮系统从 20 mm 起浮至 12 mm。粒子群优化通 将寻优得到的全局最优参数加入单点悬浮控制
过适应度函数来对悬浮过程进行评价,完成对控制 系统中进行对比,验证新参数下加速度反馈控制的
参数的寻优。适应度函数越小值越小,越能达到优 优越性。利用 MATLAB 软件搭建悬浮系统仿真模
化目标。图 9 为适应度函数的迭代曲线。 型,所有仿真试验均通过 Simulink 平台完成。首先
从最优适应度进化曲线可知,传统的 PSO 算法 进行静浮试验,新参数下悬浮系统能够稳定悬浮,响
在快速迭代约 12 次以后最优适应度就不再有明显 应过程略有超调,但超调量小于 2.5%,满足设计要
变化,在迭代 22 次时就已收敛至 0.909。使用禁忌 求。系统稳定后在 2 s 处施加干扰,与 PID 控制对比