
Page 165 - 《振动工程学报》2025年第11期
P. 165
第 11 期 徐俊起,等:具有粒子群-禁忌搜索算法的高速磁浮悬浮系统加速度反馈控制 2623
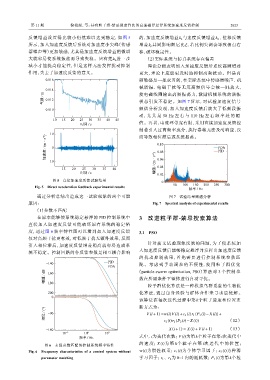
反馈增益设置得比较小仍然难以达到稳定,如图 5 的,加速度反馈增益 k a 与速度反馈增益 、位移反馈
k d
所示,加入加速度反馈后系统对加速度小尖峰(传感 增益 k p 共同影响阻尼比 ξ,若比例失调会导致极点右
器噪声等)更加敏感,尤其是加速度反馈增益稍微增 移,破坏稳定性。
大就容易使系统振荡而导致失稳。只有把 k a 进一步 (2)实际系统与仿真系统存在偏差
减小才能提高稳定性,但是这样无法发挥扰动抑制 理论分析表明加入加速度反馈后系统高频增益
作用,失去了加速度反馈的意义。 更大,理论上应能更及时地抑制高频扰动。但是高
0.016 频敏感是一把双刃剑,在实际系统中传感器噪声、机
械谐振、电磁干扰等无用高频信号会被一同放大,
0.014
气隙 / m 0.012 使电磁线圈输出高频振荡力,激励机械系统的谐振
模态引发不稳定。如图
所示,对试验加速度信号
7
频谱分析发现,加入加速度反馈后放大了低频段振
0.010
动, 尤 其 是 50 Hz 左 右 与 110 Hz 左 右 频 率 处 的 幅
10 15 20 25 30 35 40 45
时间 / s 值。再者,电流环带宽有限,采用直接加速度反馈控
制若引入过高频率成分,执行器将无法及时响应,反
10 而导致相位滞后或系统振荡。
加速度 / (m·s −2 ) 0 0.10 PDA
PID
0.08
−10 幅值 / (m·s −2 ) 0.06
15 20 25 30 35 40 0.04
时间 / s
0.02
图 5 直接加速度反馈试验结果 0
50 100 150 200 250 300
Fig. 5 Direct acceleration feedback experimental results
频率 / Hz
通过分析总结出造成这一试验现象的两个可能 图 7 试验结果频谱分析
原因: Fig. 7 Spectral analysis of experimental results
(1)参数不匹配
在原本能够使系统稳定悬浮的 PID 控制系统中 3 改 进 粒 子 群 -禁 忌 搜 索 算 法
直接加入加速度反馈可能破坏原有系统的稳定裕
度,通过图 6 频率特性图可以看到加入加速度反馈 3.1 PSO
仅对高频干扰更有效,对低频干扰无额外效果,反而
针对前文试验现象反映的问题,为了使系统加
引入相位滞后,加速度反馈增益稍高就容易造成系
统不稳定。控制回路的各反馈参数是相互耦合影响 入加速度反馈后能够稳定悬浮并发挥出加速度反馈
的 扰 动 抑 制 效 果, 首 先 需 要 进 行 控 制 系 统 参 数 匹
−140 PID 配 。 考 虑 到 手 动 调 参 的 不 便 性, 使 用 粒 子 群 优 化
PDA (particle swarm optimization, PSO)算法对 个控制参
幅值 / dB −160 数在所需条件下整体进行自动寻优。 3
−180
粒子群优化算法是一种模拟鸟群觅食的生物优
−200 化算法,通过自身经验与群体合作来寻求最优解。
0
该算法在每次迭代过程中第 k个粒子速度和位置更
新方式为:
相位 / (°) −90 V (i+1) =w(i)V (i)+c 1 (i)r 1 (P 1 (i)− X (i))+ (12)
c 2 (i)r 2 (P 2 (i)− X (i))
−180 X (i+1) = X (i)+V (i+1) (13)
10 −2 10 0 10 2
频率 / Hz 式中, i为迭代次数; V (i)为第 k个粒子在第 i次迭代中
的 速 度; X (i)为 第 k个 粒 子 在 第 i次 迭 代 中 的 位 置 ;
图 6 未经参数匹配的控制系统频率特性
w(i)为惯性权重; c 1 (i)为个体学习因子; c 2 (i)为种群
Fig. 6 Frequency characteristics of a control system without
parameter matching 学习因子; r 1 、r 2 为 0~1 内的随机数; P 1 (i)为第 k个粒