
Page 168 - 《振动工程学报》2025年第11期
P. 168
2626 振 动 工 程 学 报 第 38 卷
观察扰动抑制效果。 0.020 PID PDA-PSO_TS
(1)施加 5 kN 阶跃干扰力模拟乘客上下车
0.018
在此工况下间隙波动减小 0.3 mm,新算法相比
于 PID 降低了 60%,施加干扰的瞬间新算法的加速 间隙 / m 0.016
度波动减小 88%,如图 10 所示。 0.014
0.012
PID PDA-PSO_TS
0.020
0.010
0 1 2 3 4
0.018
时间 / s
(a) 悬浮间隙
间隙 / m 0.016 (a) Suspension gap
0.014
0.012 100
0.010 0
0 1 2 3 4 40
时间 / s 加速度 / (m·s −2 ) 20
(a) 悬浮间隙 −100 −20 0
(a) Suspension gap
−200 0 2.2 2.4 2 3 4
1
100
加速度 / (m·s −2 ) 0 15 图 11 随机扰动下的悬浮控制结果
时间 / s
(b) 垂向加速度
(b) Vertical acceleration
10
5
0
−100
1.98 2.02 Fig. 11 Suspension control results under random disturbances
0 1 2 3 4
PID PDA-PSO_TS
时间 / s 0.020
(b) 垂向加速度
(b) Vertical acceleration 0.018
图 10 阶跃干扰下的悬浮控制结果 间隙 / m 0.016
Fig. 10 Suspension control results under step disturbances 0.014
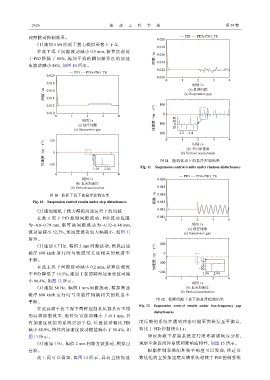
(2)施加随机干扰力模拟高速运行下的风载 0.012
在 此 工 况下 PID 控 制 间 隙 波 动 , PID 波 动 范 围 0.010 0 1 2 3 4
为−0.8~0.79 mm, 新 算 法 间 隙 波 动 为 −0.32~0.44 mm, 时间 / s
(a) 悬浮间隙
波动量减小 52.2%,加速度波动也大幅减小,如图 11 (a) Suspension gap
所示。
100
(3)施加 6.7 Hz、幅值 2 mm 间隙扰动,模拟高速
磁浮 600 km/h 运行时与轨道梁长度相关的轨道不 0
平顺。 加速度 / (m·s −2 ) −100 10
在此工况下间隙波动减小 0.2 mm,新算法相比 −10 0
−20
于 PID 降低了 16.5%,施加干扰的瞬间加速度波动减 −200 1.96 2.04
0 1 2 3 4
小 86.4%,如图 12 所示。
时间 / s
(4)施加 54 Hz、幅值 1 mm 间隙扰动,模拟高速 (b) 垂向加速度
(b) Vertical acceleration
磁浮 600 km/h 运行时与功能件周期相关的轨道不
图 12 低频间隙干扰下的悬浮控制结果
平顺。
Fig. 12 Suspension control results under low-frequency gap
在此高频干扰工况下两种控制系统都具有不错
disturbances
的高频抑制效果,绝对位置波动都小于±0.1 mm,具
有加速度反馈的系统更加平稳,位置波动相比 PID 度反馈的系统在遇到冲击时能更快恢复至平衡点,
减小 88.9%,持续的加速度波动幅值减小了 58.4%,如 相比于 PID 控制快 0.1 s。
图 13 所示。 对该参数下控制系统进行闭环频域响应分析,
(5)施加 1 Hz、幅值 2 mm 间隙方波扰动,模拟过 观察全频段闭环系统间隙响应特性,如图 15 所示。
台阶。 根据控制系统闭环频率响应可以发现,经过参
此工况可以得知,如图 14 所示,具有直接加速 数优化的直接加速度反馈系统相较于 PID 控制系统