
Page 172 - 《振动工程学报》2025年第11期
P. 172
2630 振 动 工 程 学 报 第 38 卷
滤波效果
20 −140
原始信号 滤波后信号 −160
加速度 / (m·s −2 ) 10 0 幅值 / dB −180 PID
−200
PDA
−10 −220 PDA_FIL
5 10 15 20 0
时间 / s
滤波后信号频谱 −45
0.20 相位 / (°) −90
幅值 / (m·s −2 ) 0.15 −135 10 −2 10 0 10 2
0.10
−180
0.05
频率 / Hz
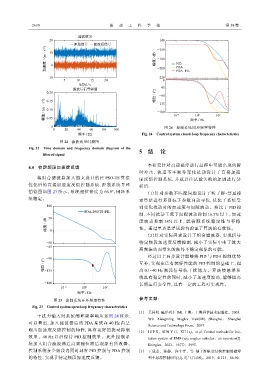
0 图 24 控制系统闭环频率特性
0 20 40 60 80 100
频率 / Hz Fig. 24 Control system closed-loop frequency characteristics
图 22 滤波效果时频图
Fig. 22 Time domain and frequency domain diagram of the
5 结 论
filtered signal
本研究针对高速磁浮运行过程中可能出现的瞬
4.4 特定频段加速度反馈
时冲击、轨道不平顺等变化扰动设计了直接加速
将组合滤波器加入前文设计的经 PSO-TS 算法 度反馈控制系统,并就以往试验失败的原因进行分
优化后的直接加速度反馈控制系统,控制系统开环 析后:
伯德图如图 23 所示,系统相位裕度为 66.9°,闭环系 (1)针对参数不匹配问题设计了粒子群-禁忌搜
统稳定。 索算法进行多目标下参数自动寻优,优化了系统受
100 到变化扰动时的加速度与间隙波动。相比于 PID 控
PDA-PSOTS+FIL
制,不同扰动工况下间隙波动抑制 16.5% 以上,加速
50 度 波 动 抑制 以 上 , 能 兼 顾 系 统 稳 定 性 与 平 稳
幅值 / dB 0 性。通过单点悬浮试验台验证了算法的有效性。
58%
(2)针对实际因素设计了组合滤波器,实现信号
−50 特定频段加速度反馈控制,减小了实际中由于放大
−45
高频振动而带来的额外不稳定现象的可能。
−90 经过以上两步设计能够将 PID 与 PDA 控制优势
相位 / (°) −135 互补,实现在已有较好性能的 PID 控制的基础上,提
高
0.1~40 Hz 频段信号抗干扰能力。算法使悬浮系
统具有稳定性的同时,减小了加速度波动,能够提高
−180 长期运行安全性,具有一定的工程可实现性。
10 −2 10 0 10 2
频率 / Hz
图 23 控制系统开环频率特性 参考文献:
Fig. 23 Control system open-loop frequency characteristics
[1] 吴祥明. 磁浮列车 [M]. 上海:上海科学技术出版社,2003.
干扰力输入时系统闭环频率响应如图 24 所示,
WU Xiangming. Maglev Train[M]. Shanghai: Shanghai
可以看出,加入滤波器后的 PDA 系统在 40 Hz 内呈
Science and Technology Press,2003.
现出加速度反馈控制的特性,具有更好的扰动抑制
[2] LI F X,SUN Y G,XU J Q,et al. Control methods for levi-
效果。40 Hz 以后保持 PID 控制效果。此外控制系
tation system of EMS-type maglev vehicles:an overview[J].
统加入组合滤波器后高频相位滞后现象有所改善。 Energies,2023,16(7):2995.
控制系统在全频段内同时具有 PID 控制与 PDA 控制 [3] 王成杰,张静,许平洋,等. 基于滑模变结构控制的磁浮
的特性,实现了特定频段加速度反馈。 列车悬浮控制研究 [J]. 电气自动化,2019,41(2):86-90.