
Page 169 - 《振动工程学报》2025年第11期
P. 169
第 11 期 徐俊起,等:具有粒子群-禁忌搜索算法的高速磁浮悬浮系统加速度反馈控制 2627
PID PDA-PSO_TS PID PDA-PSO_TS
0.020 −120
−140
0.018 0.0122 −160
绝对位置 / m 0.016 0.0120 2.2 2.3 幅值 / dB −180
0.0118
0.014
−200
0.012 −220
0.010
0 1 2 3 4 10 −3 10 −2 10 −1 10 0 10 1 10 2 10 3
时间 / s 频率 / Hz
(a) 绝对位置 (a) 外力干扰下的频率响应
(a) Absolute location (a) Frequency response under force disturbances
0
100
加速度 / (m·s −2 ) −50 0 10 0 幅值 / dB −20
50
−40
−100
−150 −10 2.1 2.2 −60
0 1 2 3 4 −80
时间 / s 10 −3 10 −2 10 −1 10 0 10 1 10 2 10 3
(b) 垂向加速度 频率 / Hz
(b) Vertical acceleration (b) 间隙干扰下的频率响应
(b) Frequency response under gap disturbances
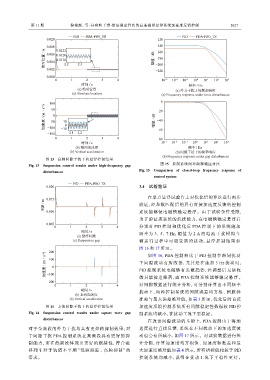
图 13 高频间隙干扰下的悬浮控制结果
图 15 控制系统闭环频率响应对比
Fig. 13 Suspension control results under high-frequency gap
Fig. 15 Comparison of closed-loop frequency response of
disturbances
control system
PID PDA-PSO_TS
0.020 3.4 试验验证
在单点悬浮试验台上对优化后的算法进行初步
0.015
间隙 / m 0.010 验证,经参数匹配后的具有直接加速度反馈的控制
系统能够使电磁铁稳定悬浮。由于试验条件受限,
为了验证该系统的抗扰能力,在电磁铁稳定悬浮后
0.005
0 1 2 3 4 分别对 PID 控制和优化后 PDA 控制下的系统施加
时间 / s 频 率为 3、 5、 7 Hz, 幅 值 为 的 电 流 干 扰 模 拟 车
(a) 悬浮间隙 2 A
(a) Suspension gap 辆 运 行 过 程 中 可 能 受 到 的 扰 动, 悬 浮 控 制 结 果 如
所示。
图 16 如图 和 17 16,PDA 控制相比于 PID 控制在相同扰动
200
加速度 / (m·s −2 ) 100 0 下间隙波动有所改善,尤其是在施加 5 Hz 扰动时,
控制系统电磁铁有发散趋势,经调整后无法收
PID
−100
−200 敛只能被迫降落,而 PDA 控制系统能够稳定悬浮。
0 1 2 3 4 对间隙数据进行统计分析,可分别计算出不同频率
时间 / s 扰动下,两种控制系统的间隙误差均方根、间隙标
(b) 垂向加速度
(b) Vertical acceleration 准差与最大误差绝对值,如表 3 所示,优化后的直接
图 14 方波间隙干扰下的悬浮控制结果 加速度反馈控制系统所有间隙稳定性数据较 PID 控
Fig. 14 Suspension control results under square wave gap 制系统均减小,在扰动工况下更稳定。
disturbances
在改善间隙波动的基础上,PDA 控制由于将加
对于全频段的外力干扰均具有更好的抑制效果;对 速度进行直接反馈,系统在不同扰动下的加速度波
于间隙干扰 PDA 控制系统在高频段具有更好的抑 动也会有所减小,如图 17 所示。对试验数据进行统
制能力,而在低频段体现出更好的跟踪性,符合磁 计分析,计算加速度均方根值、加速度标准差和最
浮列车对于轨道不平顺“低频跟踪、高频抑制”的 大加速度绝对值如表 4 所示,所有指标值相较于 PID
需求。 控制系统均减小,说明在扰动工况下平稳性更好。