
Page 170 - 《振动工程学报》2025年第11期
P. 170
2628 振 动 工 程 学 报 第 38 卷
PID PDA 表 3 不同扰动下的悬浮间隙试验数据(单位:mm)
0.0114 3 Hz Tab. 3 Experimental data of suspension gap under different
0.0112 disturbances(Unit:mm)
0.0110
指标 扰动频率 PID控制 PDA控制
0.0108 f=3 Hz 0.2033 0.1916
间隙误差
0 1 2 3 4 5 f=5 Hz 0.9418 0.1879
均方根值
0.014 f=7 Hz 0.1692 0.1253
5 Hz f=3 Hz 0.1868 0.1758
间隙 / m 0.010 间隙标准差 f=5 Hz 0.9417 0.1804
0.012
f=7 Hz
0.1664
0.1246
最大间隙误差 f=3 Hz 0.4649 0.4307
0.008 f=5 Hz 3.2852 0.4871
0 1 2 3 4 5 绝对值
f=7 Hz 0.5283 0.3355
0.0115
7 Hz
2
表 4 不同扰动下的垂向加速度试验数据(单位:m/s )
0.0110 Tab. 4 Experimental data of vertical acceleration under
2
different disturbances(Unit:m/s )
0.0105
0 1 2 3 4 5 指标 扰动频率 PID控制 PDA控制
时间 / s f=3 Hz 0.3436 0.2403
加速度
f=5 Hz 1.2246 0.6049
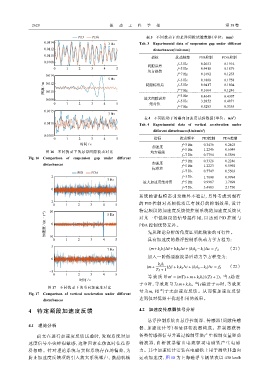
图 16 不同扰动下的悬浮间隙波动对比 均方根值
f=7 Hz 0.7794 0.5569
Fig. 16 Comparison of suspension gap under different
f=3 Hz 0.3326 0.2246
加速度
disturbances f=5 Hz 1.2223 0.5992
标准差
f=7 Hz 0.7747 0.5503
PID PDA
2 f=3 Hz 1.7898 0.9994
3 Hz
最大加速度绝对值 f=5 Hz 9.9987 1.7898
f=7 Hz 3.4903 2.1730
0
系统的谐振模态引发额外不稳定,另外考虑到现有
−2
控制对高频扰动已有较好的抑制效果,设计
PID
0 1 2 3 4 5 的 特定频段的加速度反馈使控制系统的加速度反馈只
10
加速度 / (m·s −2 ) 0 5 Hz 对某一中低频段的信号起作用,以达到 PID 控制与
控制优势互补。
PDA
−10
具有加速度的悬浮控制系统动力学方程为:
0 1 2 3 4 5 先从理论分析的角度证明此做法的可行性。
5
7 Hz (m+k a k i )∆¨c+k i k d ∆˙c+(k i k p −k c )∆c = f d (21)
加入一阶低通滤波器后动力学方程变为:
0
k a k i
(m+ )∆¨c+k i k d ∆˙c+(k i k p −k c )∆c = f d (22)
−5 Ts+1
0 1 2 3 4 5
等 效 质 量 m = (mTs+m+k a k i )/(Ts+1), 当 s趋 近
′
时间 / s
于 0 时,等效质量为 m+k a k i ,当 s趋近于 ∞时,等效质
图 17 不同扰动下的垂向加速度对比
量为 m,相当于无加速度反馈。从而使加速度反馈
Fig. 17 Comparison of vertical acceleration under different
达到仅对低频干扰起作用的效果。
disturbances
4 特 定 频 段 加 速 度 反 馈 4.2 加速度传感器信号分析
悬浮控制系统由悬浮控制器、传感器(间隙传感
4.1 理论分析
器、加速度计等)和悬浮斩波器构成。控制器获得
前文在进行加速度反馈试验时,发现系统对加 各类传感器信号并通过控制算法产生控制变量驱动
速度信号小尖峰很敏感,这种因素在仿真时往往容 斩 波 器, 由 斩 波 器 输 出 电 流 驱 动 电 磁 铁 产 生 电 磁
易忽略。针对理论系统与实际系统存在的偏差,为 力。其中加速度计安装在电磁铁上用于测量其垂向
防止加速度反馈项的引入放大系统噪声、激励机械 运动加速度,图 18 为上海磁浮车辆某次以 430 km/h