
Page 86 - 《振动工程学报》2025年第9期
P. 86
2016 振 动 工 程 学 报 第 38 卷
表 1 基于原型车 CRH 380A 简化的四分之一车模型参数 状态空间方程,可以描述车辆在多跨铁路桥梁上持
Tab. 1 Simplified quarter car model parameters based on 续运行的实时混合试验的状态变化。
prototype CRH 380A
参数 数值 3 走 行 车 桥 实 时 混 合 试 验 系 统 的 稳 定 性
m c /kg 33786
分 析 方 法
−1
k c /(kN·m ) 900
−1
c c /(kN·s·m ) 40
m b /kg 4112 对于线性时不变系统,可以根据其离散状态转
−1
k b /(kN·m ) 7088 移矩阵的谱半径 [28] 来判断系统稳定性,若谱半径大
−1
c b /(kN·s·m ) 80 于 1 则系统失稳,反之则系统稳定。然而由式 (27)
m w /kg 5068
可以看出,走行车桥 RTHT 系统的状态转移矩阵随
0.4 时间发生变化,这意味着该系统的谱半径也随时间
加速度 / (m·s −2 ) −0.2 0 判断该系统的稳定性。 RTHT 系统的稳定性与其谱
变化,无法直接使用线性时不变系统的稳定性理论
0.2
为了研究走行车桥
−0.4 半 径 之 间 的 关 系, 本 文 基 于 式 (27) 进 行 了 仿 真 分
0 0.05 0.10 0.15 0.20 0.25 0.30 0.35 析。其中车辆和桥梁参数与 2.4 节中的参数相同,振
时间 / s
动台加载误差取 40 ms 的时滞误差,仿真的积分步长
×10 −4
0 取 1 ms。
子结构迭代求解
−2 状态空间方程求解 为了能够具体描述走行车桥 RTHT 系统的稳定
位移 / m −4 性,本文采用了临界稳定质量比 [18] 的概念,当实际的
−6 车辆质量与车桥总质量的比值 β 超出临界稳定质量
i
−8 比 β Cr 时系统将会失稳,若小于临界稳定质量比则系
0 0.05 0.10 0.15 0.20 0.25 0.30 0.35
时间 / s 统稳定。临界稳定质量比的计算如下式所示:
M Cri
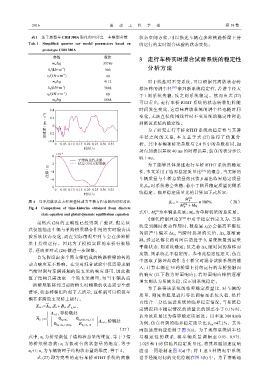
图 4 基于离散状态方程和整体动力平衡方程求解的时程对比 β Cri = P ×100% (28)
M Cri + M N
Fig. 4 Comparison of time-histories obtained from discrete P
式中, M 为车辆总质量;M N 为单跨桥梁的总质量。
Cri
state equation and global dynamic equilibrium equation P
[28]
《现代控制理论》 中对于稳定性定义为:当系
虽然式 (26) 的正确性已经得到了验证,但是该
统受到瞬时扰动作用时,被控量 x c (t) 会偏离平衡位
式仅能描述车辆与单跨桥梁耦合作用的实时混合试
置而产生偏差 Δx c ,当瞬时扰动消失后,Δx c 逐渐衰
验系统状态变化,而在实际情况中列车会在多跨桥
减,经过足够长的时间后趋近于 0,系统恢复到原来
梁上持续运行。因此为了模拟实际的车桥行驶场
平衡状态,则系统稳定;反之若 Δx c 随时间的推移而
景,还需要对式 (26) 做进一步调整。
发散,则系统是不稳定的。参考此稳定性定义,仿真
首先假设由多个简支梁组成的铁路桥梁的各跨
中选取了脉冲荷载作为车桥实时混合试验系统的输
动力响应互不影响。在实时混合试验中仅需要求解
入,计算车辆在 30 跨桥梁上持续运行的车桥接触面
当前时刻与车辆接触的简支梁的响应即可,因此数
的响应 (以下称为界面响应),若界面响应峰值逐渐
值子结构只需选取一个简支梁模型,每当车辆从前
增大则认为系统失稳,反正则系统稳定。
一跨桥尾转移到当前跨桥头时桥梁的状态需要全部
为了获得该系统的临界稳定质量比,对车辆的
清零,状态转移矩阵如下式所示,这样就可以模拟车
质量、刚度和阻尼进行等比调幅至系统失稳,然后
辆在多跨简支梁桥上运行。
再结合二分法逼近系统的临界稳定情况,当系统稳
Z i+1 =A i+1 Z i + B i+1 F g,i+1 ,
定情况和不稳定情况的质量比的误差小于 0.1% 时,
A i+1 , 非桥墩处
认为该质量比为临界稳定质量比。以车速
[ ] 300 km/h
A i+1 = 0 n b ×n b 0 n b ×(n t +n v +3)
A i+1 , 桥墩处
为例,仿真得到的临界稳定质量比 β Cri =47.1%。其界
0 (n t +n v +3)×n b E n t +n v +3
(27) 面加速度响应绘制于图 5(a)。为了观察系统谱半径
式中,n b 为桥梁数值子结构状态量的维度,等于 3 倍 与 稳 定 性 的 联 系, 将 车 辆 质 量 调 幅 至 0.95、 0.975、
的桥梁模态数;n t 为振动台的状态量的维度,等于 1.025 和 1.05 倍临界稳定质量比,将其界面加速度响
n d +1;n v 为车辆物理子结构状态量的维度,等于 4。 应也一同绘制在图 5(a) 中;将上述 5 种情况中系统
式 (27) 即为完整的走行车桥 RTHT 系统的离散 谱半径随时间的变化绘制在图 5(b) 中。为了清晰地