
Page 82 - 《振动工程学报》2025年第9期
P. 82
2012 振 动 工 程 学 报 第 38 卷
的增加,使用上述试验方法测试行车性能时存在一
定的局限性,如台架试验难以模拟列车和桥梁的相 1 走 行 车 桥 实 时 混 合 试 验 系 统 的 相 互
对运动,线路试验成本较高,比例模型试验由于桥梁 作 用 分 析
模型长度的限制,难以模拟列车的高速运行场景。
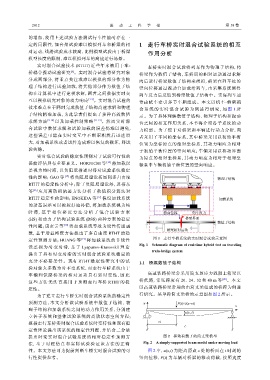
实时混合试验技术 (RTHT) 近些年来被用于车- 车桥实时混合试验将列车作为物理子结构,将
[6]
桥耦合振动试验研究 。实时混合试验将研究对象 桥梁作为数值子结构,车桥间的相对运动通过求解
分成两部分,将重点关注或难以模拟的部分作为物 向后运行桥梁数值子结构来模拟,桥梁在列车处的
理子结构进行试验加载,将其他部分作为数值子结 竖向位移通过振动台加载给列车,由采集系统测得
构在计算机中进行建模求解,两者之间数据实时交 列车反力后反馈到桥梁数值子结构中。实际列车通
互以模拟研究对象的动力响应 [7-8] 。实时混合试验的 常由机车牵引多节车厢组成。本文以机车-桥梁耦
技术难点在于同时完成数值子结构高速求解和物理 合 系 统 的 实 时 混 合 试 验 为 例 进 行 研 究, 如 图 1 所
子结构精准加载,为此学者们提出了多种高效数值 示。为了具体理解数值子结构、物理子结构和振动
求解方法 [9-10] 以及加载控制策略 [11-13] 。然而实时混 台之间的相互作用关系,本节将介绍各子系统的动
合试验中数值求解和试验加载的误差仍难以避免, 力模型。为了便于对桥梁和车辆进行动力分析,两
这些误差可能在实时交互中不断累积然后迅速增 者采用了不同的坐标系,其中桥梁采用以初始平衡
大,对加载系统或者试件造成难以恢复的破坏,即试 位置为坐标原点的绝对坐标系,其动力响应为相对
验失稳。 于初始平衡位置的竖向响应;车辆采用以移动界面
实时混合试验的稳定性预测对于试验可行性的 为原点的相对坐标系,其动力响应为相对于相对坐
提前评估具有重要意义。HORIUCHI 等 [14] 将加载误 标系中车辆初始平衡位置的竖向响应。
差视为纯时滞,以负阻尼描述时滞对试验系统稳定
性的影响;GAO 等 [15] 将负阻尼理论拓展到多自由度 物理子结构
RTHT 的稳定性分析中;除了负阻尼理论外,迟福东
等 [16] 应用离散根轨迹方法分析了数值积分算法对
RTHT 稳定性的影响;ENOKIDA 等 [17] 假设加载系统 加载系统
的动态误差可以被较好地补偿,将加载系统视为纯
时 滞, 基 于 相 位 裕 度 方 法 分 析 了 混 合 试 验 方 案 桥面位移 列车反力
(HS) 和动力子结构试验系统 (DSS) 两种方案的稳定 移动界面
数值子结构
性问题;唐贞云等 [18] 将加载系统等效为线性传递函
桥梁相对运动
数,基于增益裕度方法提出了多自由度 RTHT 的稳
图 1 走行车桥系统的实时混合试验示意图
[19]
定性预测方法;HUANG 等 将加载系统的非线性
误 差 视 为 时 变 时 滞, 基 于 Lyapunov-Krasovskii 理 论 Fig. 1 Schematic diagram of real-time hybrid test on traveling
train-bridge system
提出了具有时变时滞的实时混合试验系统稳定的
充 分 不 必 要 条 件 。 现有 RTHT 稳 定 性 研 究 中 的 试 1.1 桥梁数值子结构
验对象大多数为时不变系统,而走行车桥系统由于
车 辆 和 铁 路 桥 梁 的 相 对 运 动 具 有 强 时 变 性, 因 此 高速铁路桥梁常采用简支预应力混凝土箱梁以
这 些 方 法 无 法 直 接 用 于 预 测 走 行 车桥 RTHT 的 稳 桥代路,常见跨度有 20、24、32 和 40 m 等 [20] 。本文
定性。 以高速铁路桥梁常用的由简支梁组成的桥跨为例进
为了建立走行车桥实时混合试验系统的稳定性 行研究。某单跨简支梁桥的示意图如图 2 所示。
预测方法,本文分析该试验系统中数值子结构、物 u P(t)×δ(x−vt)
x
理子结构和加载系统之间的动力作用关系,分别建
u(x, t)
立各子系统和整体试验系统的离散状态空间方程;
根据走行车桥实时混合试验系统时变特性和现有稳 vt
L
定性理论提出该系统的稳定性判据,并结合二分法
提出时变实时混合试验系统的相对稳定性预测方 图 2 移动荷载下的简支梁模型
法, 基 于 时 程 仿 真 和 实 际 试 验 验 证 该 方 法 的 正 确 Fig. 2 A simply-supported beam model under moving load
性。本文方法可为提前判断车桥实时混合试验的可 图 2 中,u(x,t) 为距离原点 x 处的桥面在 t 时刻的
行性提供参考。 竖向位移,P(t) 为车辆对桥梁的移动荷载,按照速度