
Page 77 - 《振动工程学报》2025年第9期
P. 77
第 9 期 朱前坤,等:结构三维形变的双目立体视觉鲁棒监测研究 2007
有限元滑动窗口作为子区域,对子区域内的应变像 增加,测量误差趋于降低,但超过 30 pixel 后,会产生
素进行平均,即可产生与应变片测量相当的应变结 过度拟合导致误差放大,因此确定最佳拟合步长为
果。相较于应变片方法,有限元滑动窗法提高了对 30 pixel,测量误差为 0.025。
局部应变分布的采样密度,可灵活选择子区域的位
置,实现对整个感兴趣区域的全场应变测量,获得连 真实形变值
续应变场。 有限元模型 评估
耦合 有限元变形 等效变形
立体视觉测量
2 试 验 设 计 和 数 据 处 理
形变图像信息
基于物理图形模型 变形可视化
本 文 通 过 均 方 根 误差 (RMSE) 和 误 差 面 积 比 虚拟环境 Z
(EAR) 评估所涉及到的算法测量精度,分别表示为: ROI B X Y
v
u
t t 2 Y X 双目相机测量系统 A B
u r ∑(
)
c
σ −σ i Z 模拟光源
i
i=1
RMSE = (22)
r
式中, σ 为本文方法测量的数据; σ 为参考数据,r 为 图 8 算法评估框架
t
c
i i
数据个数。 Fig. 8 Algorithm evaluation framework
∑
1(∈ i > E t ) 以有限元分析获得的形变数据作为参考数据,
i∈P
EAR = (23) 将本文方法与 3D-DIC 方法进行精度比较,并通过误
P
{
1 ,if x is true 差对比进行定量分析,为进一步优化所提方法的参
式 中, 1(·) 为 指 标 函 数 ; 1(x) = ∈ i 表
0,if x is false 数提供直观参考。
示第 i 个像素点的位移/应变测量的误差值; E t = 0.015×
2.1.2 结果分析
[ ]
(max(g)−min(g) ,其中 g 表示位移/应变真值;P 为像
在获得的结构变形图像中分别选取第二跨和第
素总数。
三跨跨中 1200×360 pixel 大小的感兴趣区域用于分
2.1 基于 PBGM 虚拟现实技术模拟试验 析。通过开源 3D-DIC [18] 程序和本文所提方法对其
进行分析,得到的 A、B 点的位移和应变时程,通过
2.1.1 试验设计 与有限元分析所得的真值进行对比,误差分析如表 1
HOSKERE 等 [17] 开发基于物理的图形模型 (PBGM), 所示,可知 B 点的误差大于 A 点,由于 B 点位于结构
该技术通过建立结构的物理模型,结合图形渲染算 跨中最大变形区,存在图像匹配难度加大等困难,导
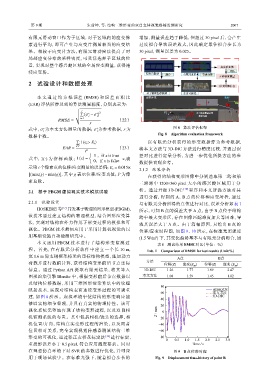
法,实现对结构在外力作用下形变过程的模拟和可 致其误差大于 A 点。由于篇幅原因,只给出 B 点的
视化。PBGM 技术最初应用于采用计算机视觉的民
位移/应变时程图,如图 9、10 所示,在标准光照强度
用基础设施自动检测研究中。 (1.5 W/m ) 下,其变化趋势基本与有限元分析吻合,因
2
本 文 运用 PBGM 技 术 进 行 了 结 构 形 变 监 测 过 表 1 测试结果 RMSE 对比(单位:%)
程。首先,在有限元分析软件中建立一个长 10 m, Tab. 1 Comparison of RMSE for test results (Unit:%)
宽 1.6 m 简支钢框架桥梁的目标结构模型,施加动力 A点 B点
荷载并进行数值计算,获得结构变形前后节点坐标 方法 位移(Z) 应变(E yy ) 位移(Z) 应变 (E yy )
信息。通过 Python API 提取有限元结果,将其导入 3D-DIC 1.26 1.77 1.69 2.47
图形渲染引擎 Blender 中,根据变形前后节点数据以 本文方法 1.08 1.59 1.45 1.82
及结构位移数据,采用三维图形渲染算法中的纹理
80
映射技术,实现对结构表面连续变形过程的可视重 ABAQUS
60 本文方法
建,如图 8 所示。虚拟环境中使结构的形变响应能 40 3D-DIC
够以实物细节呈现,并具有真实的物理特性。该可 20
视化系统完整地再现了结构变形过程,以及双目相 Z / mm 0
机监测系统的布置。其中包括相机/镜头的选择,相 −20
机位置/方向,结构真实变形过程的渲染,以及两者 −40
位置相对关系,完全实现视觉传感器测量结构三维 −60
形变的可视化,通过张正友棋盘标定法 [12] 进行标定, −80
0 0.5 1.0 1.5 2.0 2.5 3.0
重投影误差小于 0.5 pixel,符合应用精度要求。同时 Time / s
在理想仿真环境下对 SVR 的参数进行优化,并可应 图 9 B 点位移时程
用于现场试验中。在标准光强下,随着拟合步长的 Fig. 9 Displacement time-history of point B