
Page 78 - 《振动工程学报》2025年第9期
P. 78
2008 振 动 工 程 学 报 第 38 卷
3.0×10 −4 ABAQUS 通过改变虚拟环境中的光源强度参数模拟不同
2.0×10 −4 本文方法 光照强度的试验工况,在不同工况下,将本文方法与
3D-DIC
1.0×10 −4 3D-DIC 方法在 B 点处计算得到的应变值与有限元
E yy / ε −1.0×10 −4 0 真值进行对比,结果如表 2 所示,可知 1.8%,说明 产生
3D-DIC
的误差波动为
11.5 %,本文方法仅为
−2.0×10 −4 3D-
DIC 对光强较为敏感,同时验证了本文方法的鲁棒性。
−3.0×10 −4
−4.0×10 −4 表 2 不同光照强度下测试结果 RMSE 对比(单位:%)
0 0.5 1.0 1.5 2.0 2.5 3.0 Tab. 2 Comparison of RMSE for test result under different
Time / s
light intensities(Unit:%)
图 10 B 点应变时程
−2
光照强度/(W·m ) 3D-DIC 本文方法
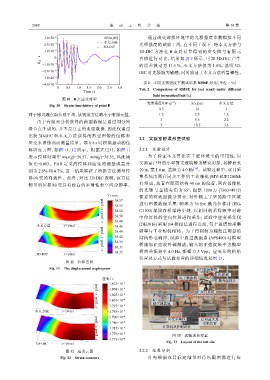
Fig. 10 Strain time-history of point B
0.5 14 3
对于感兴趣点取位移平均,故视觉方法略小于有限元值。 1.5 2.5 1.8
由于有限元分析获得的曲面数据是通过划分网 3 5.6 2.2
5 10.5 3.6
格节点生成的,并不是真正的曲面数据,因此仅通过
比较 3D-DIC 和本文方法获得的形变图像的位移和
2.2 实验室桥梁形变试验
应变来评价曲面测量结果。取 0.8 s 时桥梁振动的位
移应变云图,如图 11、12 所示。根据式(23),如图 11 2.2.1 试验设计
所示位移结果中 max(g)=38.57, min(g)=38.35,因此阈 为了验证本文算法在工程环境中的可用性,以
值 E t =0.003。EAR 定义的位移和应变的测量误差分 实验室户外的小型简支玻璃桥为研究对象,其桥面长
别为 2.6% 和 4.7%,这一结果验证了所提方法测量位 10 m,宽 1.6 m,基频为 4.0 Hz [19] 。试验过程中,双目采
移/应变的有效性。此外,对比 3D-DIC 表明,该方法 集系统由两台同步工作的工业相机 (MV-SUF1200M-
测量的位移/应变具有较高的平滑性和空间分辨率。 T) 组成,放置在距离结构 40 cm 的位置,两台摄像机
的光轴与基线夹角为 65°,提供 1200 万 (7360×4912)
Z / mm 像素的有效图像分辨率,对外侧工字梁的跨中区域
z / pixel 38.57 进行图像数据采集,帧率为 30 fps;激光位移计 (HG-
38.55
C1100) 架设在桥梁跨中处,以相同的采样频率对跨
38.52
x / pixel 38.50 中位置处的竖向位移进行采集;试验中应变采集仪
38.48
本文方法 y / pixel 38.46 (DH3816) 采用 1/4 桥接法进行连接,每个通道的采集
z / pixel 38.44 频率与工业相机相同。为了得到较为理想且明显的
结构形变响应,试验中通过激振器
(APS400) 对模型
38.42
x / pixel 38.39 桥施加正弦波外部激励,输入的正弦波频率为模型
38.37
3D-DIC y / pixel 38.35 桥的共振频率 4.0 Hz,振幅为 5 Vpp。应变片的粘贴
位置及方式与试验布置的详细情况见图 13。
图 11 位移云图
Fig. 11 The displacement nephogram 双目标定模块
标定板
应变 / ε −4 电子激振器 激光位移计
D
z / pixel 1.812×10 −4 C 25 cm E 双目系统
1.808×10
−4
1.805×10
x / pixel 1.801×10 −4 感兴趣区域 10 cm
−4
1.797×10
本文方法 y / pixel 1.793×10 −4
−4
z / pixel 1.790×10 −4 应变采集仪 信号放大及
1.786×10
采集装置
1.782×10 −4 计算机及控制设备
x / pixel 1.779×10 −4 图 13 试验现场布置
−4
1.775×10
Fig. 13 Layout of the test site
3D-DIC y / pixel
图 12 应变云图 2.2.2 结果分析
Fig. 12 Strain contours 首先根据双目标定结果对待匹配图像进行校