
Page 73 - 《振动工程学报》2025年第9期
P. 73
第 9 期 朱前坤,等:结构三维形变的双目立体视觉鲁棒监测研究 2003
[6]
构 。目前,基于多视角摄像系统的三维数字图像相
未处理的图像
[7]
关技术 (3D-digital image correlation,3D-DIC) 实现了
预处理
结构三维形变测量,但 3D-DIC 技术的本质是基于块
分辨率的模板匹配方法,精度受到图像低空间分辨 图片相位 亚像素光流跟踪 输出光流矢量
信息
率的限制,同时依赖于图像的像素强度,对光学噪声
敏感,需要人工散斑标志作为特征点,因此难以有效 SVR超平面拟合
平滑位移场 改进的SGBM
应 用 于 环 境 条 件 复 杂 多 变 的 工 程 现 场 。CHANG
等 [8] 利用基于 Harris 角点检测的双目视觉技术实现 基于应变传感器原理
了地震荷载作用下的框架模型的位移动态测量;DU 等 [9]
应变场
通过模板匹配与特征检测相结合的方法实现了桥梁
的位移监测,但两种方法均依赖于标志物,对测量精 图 1 技术框架
度存在影响。SHAO 等 [10] 基于深度学习匹配技术和 Fig. 1 Technology frame
KLT( Kanade-Lucas-Tomasi) 光 流 跟 踪 技 术 实 现 了 无
Z W
目标三维全场振动位移测量;SUN 等 [11] 利用单目相
机和深度学习对结构三维位移进行了测量。然而, Y W 世界坐标系
上述方法高度依赖训练数据和网络模型,难以推广
P(X W , Y W , Z W ) X W
应用,同时深度学习方法的泛化能力及其在工程实
际应用中的鲁棒性仍有待进一步验证。
v v
基于以上研究,为了实现结构三维形变的鲁棒
P L P R
u u 图像坐标系
监测,本文基于图像相位立体匹配时序分析方法构 外参矩阵
建了结构三维形变监测系统。通过基于相位的稠密
光流追踪算法和改进的基于相位的半全局立体匹配 内参矩阵 z c z c x c
(semi-global block matching, SGBM) 算 法 对 感 兴 趣 区 x c
y c 平移、旋转 y c
域的像素点进行监测,获得全场三维位移场;将支持 相机坐标系
向量回归 (support vector regression,SVR) 算法和基于 左相机 基线 右相机
应变传感器原理相结合实现了结构三维形变的测量。
图 2 双目相机系统成像模型
在基于物理的图形模型 (physics-based graphics models,
Fig. 2 Imaging model of binocular camera system
PBGM) 的仿真试验环境中,将本文方法、开源 3D-DIC
和有限元分析的结果进行比较,并在实验室户外桥 相机标定的关键是确定内参矩阵和外参矩阵。
梁模型上与传统接触式监测传感器进行对比分析。 内参矩阵定义图像的二维几何属性,将相机坐标中
的点 P 映射到二维图像上的点 P L 、P R 。外参矩阵决
1 双 目 立 体 视 觉 三 维 形 变 监 测 系 统 定双目相机之间的位置与方向关系,是实现二维图
像到三维世界坐标转换的基础。同时标定过程可以
消除几何畸变、校正图像,从而确保视觉分析结果
本文提出的双目视觉结构三维形变监测系统是
的可靠性。因此,相机标定 [12] 是保证分析结果准确
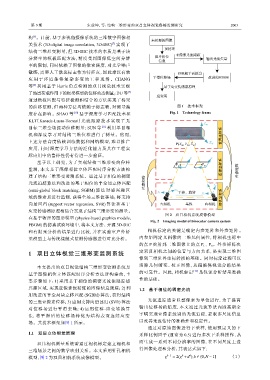
基于图像相位立体匹配时序分析方法所构建的,主
要步骤如下:1) 采用基于相位的稠密光流法跟踪感 性的基础。
兴趣区域,实现亚像素级精度的图像信息跟踪;2) 利 1.2 基于相位的稠密光流
用改进的半全局块立体匹配 (SGBM) 算法,获得结构
的三维亚像素位移;3) 应用支持向量回归 (SVR) 算法 光流追踪通常以整像素为单位进行,为了提高
对位移场进行平滑去噪;4) 运用位移-应变转换算 输出位移场的精度,本文通过光流算法内嵌高斯金
法, 将 平 滑 后 的 位 移 场 转 化 为 结 构 表 面 连 续 应 变 字塔实现亚像素级别的光流追踪,提取多尺度信息
场。其技术框架如图 1 所示。 以改善光流估计的准确性和稳定性。
通过对原始图像进行下采样,使用预定义的下
1.1 双目立体视觉原理 采样比例因子 (通常为 0.5) 进行多次下采样操作,从
而生成一系列不同分辨率的图像,在不同尺度上进
双目相机测量系统需通过相机标定建立相机和
三维场景之间的数学映射关系。本文采用针孔相机 行图像处理和分析,其表达式如下:
k
k
模型,图 2 为双目相机系统成像模型。 g k−1 = 2(g +d ),k ∈ (0,N −1] (1)