
Page 76 - 《振动工程学报》2025年第9期
P. 76
2006 振 动 工 程 学 报 第 38 卷
获得的位移场存在一定噪声,对后续应变计算的精 n ∑
µ = α i −α ϕ(x i )
( ∗ )
度存在一定的影响,采用传统曲面拟合方法时,容易 i
i=1 (20)
对原始噪声产生放大效应,无法有效滤除噪声。为 n ∑
f(x) = (α i −α )K(x i , x)+q
∗
解决此问题,本文采用支持向量回归 (SVR) [16] 对位 i=1 i
移场进行平滑处理,模型示意图如图 6 所示。SVR 式中, α i α 为 ∗ Lagrange 乘子; K(x i , x)为核函数,表示
、
i
通过在高维特征空间中找到一个最佳拟合线组成的 为 K(x i , x) = ⟨ϕ(x i ),ϕ(x)⟩。
超平面,实现对位移数据的最优分类,与其他方法相 1.4.2 基于应变传感器原理的位移-应变计算
比,SVR 具备强大的泛化能力,可以有效提取位移场 传统应变计算从有限元位移场出发,通过数值
中的有效信息,滤除噪声。 差分等方式近似求导,来获取各单元的应变。相较
而言,电阻应变片可以直接、连续地测量表面的应
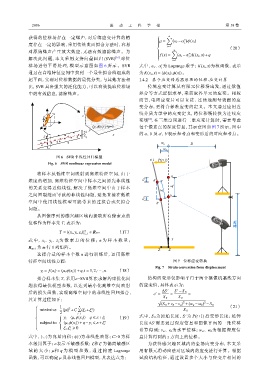
变分布,更符合标准应变的定义。本文通过应用连
续介质力学中的应变定义,将位移场转换为连续应
z
ε 变场 ,在三维空间进行二维应变计算时,需要考虑
[4]
ξ
μ, ϕ(x i ) +q=0 每个像素点的深度信息,其示意图如图 7 所示,图中
+ε y 的 及 a'、b'表示参考点和变形后的对应参考点。
ξ 0 −ε x a、b
D
w a
w b
图 6 SVR 非线性回归模型 t
t+1 P(t+1)
Fig. 6 SVR nonlinear regression model
将样本从低维空间映射到高维特征空间,由于
a
维度的增加,高维特征空间中样本之间原先非线性 v a a′
的关系变得近似线性,解决了低维空间中由于样本 S 0
S′
之间因裂缝而导致的非线性问题,避免直接在低维 b
v b
空间中使用线性模型可能带来的过拟合或欠拟合 b′
问题。
从图像序列的感兴趣区域内提取所有像素点的
位移作为样本集 T,表示为: 基线
n
T = {(x i ,y i ,z i )} i=1 ∈ Rm×1 (17)
式 中, x i 、y i 、z i 为 像 素 点 的 位 移 ; n 为 样 本 数 量 ; Y
R m× 为 1 m 行 1 列矩阵。
Z X
选择合适的样本个数 n 进行训练后,运用高维
特征空间线性方程: 图 7 位移应变转换
Fig. 7 Strain conversion from displacement
y i = f(x i ) = ⟨µ,ϕ(x i )⟩+q,i = 1,2,··· ,n (18)
拟合样本集 T,采用 ε−SVR算法求解约束优化问 结构的变形仅影响平行于两个摄像机基线方向
题获得最优模型参数,以达到最小化高维空间映射 的应变值,具体表示为:
′
后的损失函数,实现高维空间中的非线性回归拟合, ε = ∆S ′ = S −S 0 =
′
其计算过程如下: √ S 0 S 0
2 2
(S 0 +v b −v a ) +(w a −w b ) −S 0
1 n ∑ (21)
2
minimize ∥µ∥ +C (ξ i +ξ )
∗
i S 0
2
i=1
式中, S 0 为原始长度, S 为 ′ P(t+1) 后变形长度;延伸
(19)
y i −⟨µ,ϕ(x i )⟩−q ⩽ ε+ξ i
subject to ⟨µ,ϕ(x i )⟩+q−y i ⩽ ε+ξ ∗ 长度 ∆S 需要通过深度信息和图像平面的一维位移
′
i
ξ i ,ξ ⩾ 0
∗
、
、
i 计算得到; v a v b 为水平位移; w a w b 为根据深度信
式中, ⟨·,·⟩为向量内积; ϕ(·)为非线性映射;C>0 为样 息计算得到的 z 方向上的位移。
本惩罚因子; ε表示不敏感系数; ξ和 为偏离敏感区 为获得感兴趣区域内的全场应变分布,本文采
ξ
∗
域 的 大 小; µ和 q 为 模 型 参 数 , 通 过 构 建 Lagrange 用有限元滑动窗法对区域内的应变进行计算。根据
函数,可以确定 μ 及非线性回归模型,其表达式为: 试验结构特征,通过设置多个大小与应变片相同的