
Page 74 - 《振动工程学报》2025年第9期
P. 74
2004 振 动 工 程 学 报 第 38 卷
式中, g 为第 k 层的初始光流预测值; d 为第 k 层的 数 根 据 多 项 式 近 似 所 需 的 不 确 定 性 参 数 个 数 来
k
k
光流计算结果;设金字塔最顶层为 N–1 层,初始光流 选择。
[ ]
u k 将输入的图像视为二维函数,通过 2D-Gabor 滤
;
预测值 g N−1 = 0 d = , u 、 分别为被追踪点局
k
k
k
v
v k
波后得到图像中像素点的相位信息,以感兴趣的像
部坐标中 x、 y 方向的光流矢量。
素点为中心构建一个局部坐标系,可近似为:
对采集的图像序列通过 2D-Gabor 滤波进行预处 [ ]
2
2
f θ (x,y) T = r 1 +r 2 x+r 3 y+r 4 x +r 5 y +r 6 xy[θ,θ +π]
理,从而得到预定方向上的图像相位信息,表达式
(5)
如下:
考虑到 Gabor 滤波器在频率上的共轭对称性,滤
(x,y,t) = I(x,y,t)∗G θ,i (x,y),i = 1, 2,··· ,N (2)
I G θ,i 波器的角度只需要在 [θ,θ + π] 的区间内考虑,以此
式中, I G θ,i (x,y,t)为滤波输出图像; I(x,y,t)表示输入图 决 定 滤 波 器 的 数 量 。 设 滤 波 器 的 间 隔 角 度为 30°,
像;“*”表示卷积;i 表示滤波器的数量;θ 为滤波器 数量为 6 个。利用加权最小二乘法来拟合邻域信
的初始角度; G θ,i (x,y)为 2D-Gabor 滤波器,表达示如下: ( r 2 )
息, 得 到 一 个 六 维 系 数 r 1 ,··· ,r 6 。 设 f= r 1 , h= ,
r 3
G θ,i (x,y) = g(x,y)exp[2πj(L x +T y )] (3) ( )
r 4 r 6 /2
W= 。
式中,(L x ,T y ) 表示特定的空间频率; g(x,y)为二维高 r 6 /2 r 5
斯函数,表达示如下: 若 W 为 一 个 非 零 矩 阵 , 那 么 前 后 两 帧 的 位 移
( )
u
( ) 2 ( ,可表示为:
1 x y ) 2 d= v
g(x,y) = + (4)
−0.5
2πσ x σ y σ x σ y 1 −1
d = − W (h 2 − h 1 ) (6)
2
式中, ( σ x ,σ y 代表沿 x 和 y 方向的椭圆高斯函数的标
)
式中,h 1 、h 2 为前后两帧像素的邻域信息组成的 2×1
准偏差,决定了滤波器的空间宽度。
矩阵。
本 文 将 基 于 相 位 的 运 动 估 计 [13] 和 Farneback 光
流相结合,其中 Farneback 光流相较于稀疏光流,计 1.3 基于相位的 SGBM 立体匹配
算量略大,通过内嵌高斯金字塔对图像进行下采样
相较于传统的平面内测量,三维形变测量能够
操作实现计算量的降低。Farneback 光流是基于多项
获得更丰富的结构振动信息,更有利于准确地评估
式展开的位移场估计方法,在时域内从多项式展开
结构的实际状态。立体视觉是利用两个相机在同步
系数的变化中估计位移场变化,避免了频域内微分
工作的状态下,以不同的视角观察同一场景,根据两
与求逆的不利情况,同时图像的相位信息相对于像
个图像之间的视差来计算出物体的深度信息,实现
素强度信息更为稳定,因此提高了在环境噪声和光
二维到三维的映射。然而,原始的 SGBM 算法 [15] 基
照干扰下的鲁棒性。为弥补传统方法中图像相位信
于图像强度信息进行匹配计算,在处理纹理较少或
息缺乏时间和位置的局部信息,本文通过基于相位
者边缘区域时很容易受到限制,同时对天气和照明
光流追踪的的 2D-Gabor 滤波器 [14] 获取相位信息,实
条件等环境因素较为敏感。因此,本文将提取到的
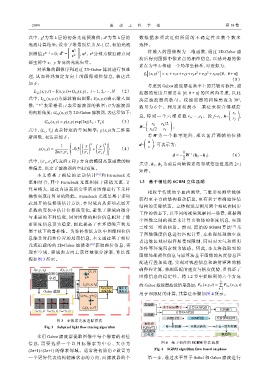
现在空域、频域和方向上获得最佳分辨率,算法流
图像局部相位信息与原算法基于图像的灰度信息匹
程如图 3 所示。
配进行叠加处理,实现对视差信息和映射矩阵的精
I(x, y, t 0 ) I(x, y, t′) (x, y) 确鲁棒计算,兼顾匹配的速度与精度优势,且保证了
高斯金
字塔 图像信息的稳定性。将 1.2 节中提取到的六个方向
6 ∑ P G n (x,y,t)
Gabor 滤波器滤波结果叠加:
的
(x, y, t 0 )
加权最小二乘 Farneback 输出光 n=1
P G (x,y,t) =
I G i
Gabor 滤波 (x+u i , y+v i ) 用于 SGBM 的计算,其算法步骤如图 4 所示。
光流追踪
流矢量
左相机
(x, y, t′) 水平Sobel算子 计算SAD代价
G 0° =(x, y) G 45° =(x, y) G 90° =(x, y) I G i 计算SAD代价 代价融合
右相机
匹配计算 SGM算法 代价值块处理
图 3 亚像素光流追踪算法
预处理
Fig. 3 Subpixel light flow tracing algorithm 代价计算 唯一性检测 亚像素插值 左右一致性检测
动态规划
后处理 视差图
采用 Gabor 滤波器提取图像中每个像素的相位
信 息, 需 要 选 择 一 个 以 目 标 像 素 为 中 心 、 大 小 为 图 4 基于相位的 SGBM 算法流程
(2n+1)×(2n+1) 的像素邻域。通常将初始角 θ 设置为 Fig. 4 SGBM algorithm flow based on phase
一个更好代表结构健康状态的方向,而滤波器的个 第一步,通过水平算子 Sobel 和 Gabor 滤波进行