
Page 142 - 《振动工程学报》2026年第5期
P. 142
1346 振 动 工 程 学 报 第 39 卷
开展磁浮系统稳定性分析,揭示失稳机理并建立有 构建双环控制结构,并利用 Routh-Hurwitz 判据约束
效的稳定域表征方法,为设计鲁棒性强、动态响应 控制器增益边界。该方法虽为参数选取提供理论依
优异的悬浮控制器的参数选择提供参考,对保障磁 据,但其稳定域分析局限于三维控制参数空间,难以
浮交通系统安全运行具有重要的理论意义和工程价值。 推广至高维复杂系统,且无法定量揭示控制参数变
在磁浮系统稳定性研究方面,国内外学者进行 化对稳定域体积的影响规律。
了许多探索。李忠继等 [9] 基于非线性振动分岔理 综上,磁浮车-轨耦合振动系统的强非线性导致
论,采用演算法分析了车岔耦合系统的悬浮稳定性, 稳定域难以显式解析,传统积分方法无法直接计算
发现控制参数稳定域存在明显的上、下限,且道岔 其体积变化。这使得系统参数与控制参数对稳定域
固有频率与悬浮频率接近时稳定域最窄,这表明系 的影响机制尚未明确,导致控制器调节过程依赖经
统参数对稳定性存在显著的影响。黎燕霞等 [10] 采用 验试错,缺乏理论指导。现有研究多聚焦单一参数
随机平均法与有限差分法,研究了随机激励下磁浮 组合下的稳定性分析,缺乏对高维参数空间中稳定
系统的左边界特征值与首次穿越问题,指出外激功 域全局拓扑的高效表征手段。
率谱是影响系统稳定性的关键因素,为随机扰动下 为解决上述问题,本文提出一种基于稳定边界
的稳定性分析提供了一种思路。李晓龙等 [11] 针对工 约束的分层自适应采样估计方法(HASE),以实现
程中存在的输出饱和问题,提出了基于最大吸引椭 车-轨耦合振动系统稳定域的高效量化表征。首先,
球搜索的参数优化方法,通过调整控制参数扩大稳 考虑轨道柔性建立闭环车-轨耦合振动动力学模型,
定域,提升了系统在实际运行条件下的可靠性。 基于 Routh-Hurwitz 判据推导稳定边界约束方程;其
在系统建模与稳定性机理研究方面,翟婉明等 [12] 次,设计 HASE 算法,通过自适应分配采样点精确逼
系统阐述了磁浮车-轨耦合动力学特性,指出 Floquet 近参数空间与控制系数空间的稳定域边界;进一步,
定理和 Lyapunov 指数法是分析系统动力稳定性的有 结合线性二次型调节器(LQR)方法设定控制系数矩
效方法,并强调应结合实际工程开展失稳机理与控 阵空间;最后,利用 HASE 量化分析系统参数与控制
制策略研究。LIU 等 [13] 进一步研究了气动荷载作用 参数对稳定域体积的影响机制,并与均匀采样估计
下刚度变化对系统稳定性的影响,发现位移反馈增 (USE)方法进行对比,验证所提方法在计算效率与
益可改变系统刚度属性,从而影响振动响应特性,为 精度上的优越性。
气动-控制耦合作用下的稳定性分析提供了重要参
考。CAO 等 [14] 基于 Hamilton 原理建立了车-轨耦合 1 车 -轨 耦 合 振 动 系 统 闭 环 模 型
振动模型,结合 Floquet 定理分析了控制参数的稳定
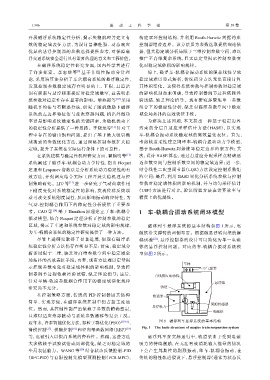
区域,揭示了车速和系统参数对稳定域的影响规律, 磁浮列车悬浮系统的基本结构如图 1 所示,电
为车-桥耦合系统的稳定性研究提供了一种方法。 磁铁沿支撑臂的两侧布置。根据磁悬浮转向架的解
尽管上述研究取得了显著进展,但现有磁浮系 耦试验 [21] ,悬浮控制器的设计可以简化为单一电磁
统稳定性分析方法仍存在明显不足:首先,稳定域分 体的悬浮控制问题。对应的车-轨耦合振动系统模
析多局限于二维,缺乏对高维参数空间中稳定域全 型如图 2 所示。
局拓扑的高效表征手段;再者,现有方法难以定量揭
车体
示控制参数变化对稳定域体积的影响机制,导致控 空气弹簧
制器调节过程依赖经验试错,缺乏理论指导;最后, 直线感应电动机
针对车辆-轨道参数耦合作用下的稳定域演化规律 悬浮架
研究尚不充分。 轨道
在控制策略方面,传统的 PID 控制器因其结构 轨道梁
简单、实现方便,在磁浮系统控制中仍占据主流地 间隙传感器
悬浮吸力
位。然而,其控制性能严重依赖于参数的精确整定,
电磁铁
且难以适应外部扰动与系统参数漂移等复杂工况。
近年来,许多智能优化方法,如粒子群优化(PSO) [15-16] 、 图 1 磁浮列车悬浮系统的基本结构
滑模控制 [17] 、模糊控制 [18] 和径向基函数网络(RBF) [19] Fig. 1 The basic structure of maglev train suspension system
等,也被引入以提高系统的鲁棒性。然而,这些方法 磁浮列车在实际运行中,轨道梁由于受到电磁
大多依赖于试验试错或局部优化,缺乏对稳定域的 吸力的持续激励,在无法有效消耗输入能量的情况
全局表征能力。WANG 等 [20] 结合状态反馈控制-PID 下会产生周期性的剧烈振动,即车-轨耦合振动,在
(SFC-PID)与有限控制集模型预测控制(FCS-MPC), 传统的刚性轨道假设下,悬浮控制器(通常为状态反