
Page 137 - 《振动工程学报》2026年第5期
P. 137
一阶固有频率随控制增益的变化 固有频率
第 5 期 王 珊,等:轨道不平顺激扰下高速磁浮列车悬浮控制参数边界及优化研究 1341
55 浮气隙的恒定。若阻尼比过小,则系统“太灵活”,
60 50 振荡严重,稳定下来需要很长时间;若阻尼比过大,
则系统“太迟钝”,反应慢,抵抗干扰的能力变差。
50 45
f n2 40 40 固有频率 / Hz 因此,对于系统的一阶模态,应确保其阻尼比在 60%~
30 80% 范围内,使得系统对扰动有足够的鲁棒性。对
35 于非主导模态,只要它们不引起稳定性问题,可以允
20
15000 30 许其阻尼比不在这个范围内。
10000 0.500
5000 0.375 25
×10 4
k s
0.250
0 0 0.125 k a 12
(b) 二阶固有频率随控制增益的变化 1.4
(b) Second-order natural frequency as a function of control gain
11
1.2
55
60
k s 10
50 1.0 一阶固有频率 / Hz
50
f n3 45 0.8 9
40 固有频率 / Hz
40
30 0.6 8
15000 35 0 0.1 0.2 0.3 0.4
10000 0.500 k a
5000 0.250
0.375
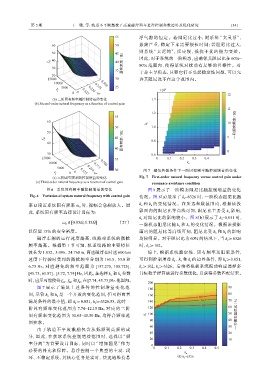
30 图 7 避免共振条件下一阶固有频率随控制增益的变化
0 0 0.125 k a
k s
(c) 三阶固有频率随控制增益的变化 Fig. 7 First-order natural frequency versus control gain under
(c) Third-order natural frequency as a function of control gain
resonance avoidance condition
图 6 系统固有频率随控制增益的变化 图 8 展示了一阶模态阻尼比随控制增益的变化
Fig. 6 Variation of system natural frequency with control gain 情况。图 8(a)展示了 k s =6326 时,一阶模态阻尼比随
率 Ω 接近系统固有频率 ω n 时,振幅会急剧放大。因 k v 和 k a 的变化情况。在所选参数范围内,根据该投
此,系统固有频率选择设计目标为: 影面内的阻尼比等高线可知,阻尼比主要受 k v 影响,
k a 对阻尼比的影响较小。图 8(b)展示了 k a =0.051 时,
ω n < [0.85Ω,1.15Ω] (27)
一阶模态阻尼比随 k v 和 k s 的变化情况。根据该投影
以保留 15% 的安全裕度。 面内的阻尼比等高线可知,阻尼比受 k v 和 k s 的影响
磁浮车辆的运行速度越高,线路对系统的激扰 均较明显。对于阻尼比为 60% 的情况下,当 k s >6326
频率越高。根据第 1 节可知,轨道线路的主要特征 时,k v >102。
波长为 1.032、3.096、24.768 m,高速磁浮在时速 600 km 综上,根据系统稳定性、固有频率及阻尼条件,
速度下行驶时受到的激扰频率分别为 161.5、53.8 和 可得到控制增益 k a 、k v 和 k s 的边界条件,即 k a >0.051,
6.73 Hz, 对 应 避 免 的 频 率 范 围 为 [137.275, 185.725]、 k v >102,k s >6326。后续将根据系统振动响应选择多
[45.73,61.87]、[5.72,7.74] Hz,因此,在选择 k a 和 k s 参数 目标粒子群算法进行参数优化,以获得参数匹配结果。
时,应尽可能使得 f n1 、f n 和 2 f n 在 3 [7.74,45.73] Hz 范围内。
200
图 7 展 示 了 满 足 上 述 条 件 的 控 制 增 益 变 化 范 180 90
围,尽管 k a 和 k s 是一个开放的变化范围,但可得两者 160 80
满足条件的最小值,即 k a >0.051,k s >6326.53,此时一 140 70
阶固有频率变化范围为 7.74~12.15 Hz,对应的三阶 120 60
固有频率变化范围为 31.65~45.50 Hz,均符合频率范 k v 100 50 一阶模态阻尼比 / %
80 40
围要求。
60 30
由于轨道不平度激励包含从低频到高频的成
40 20
分,因此,在获取系统控制增益范围时,选择以“频
20 10
率分离”为首要设计目标,同时以“增加阻尼”作为 0
必要的补充和保障。悬浮控制一个典型的主动、闭 0 0.1 0.2 0.3 0.4 0.5
k a
环、不稳定系统,其核心任务是实时、快速地维持悬 (a) k s =6326
一阶模态阻尼比