
Page 133 - 《振动工程学报》2026年第5期
P. 133
第 5 期 王 珊,等:轨道不平顺激扰下高速磁浮列车悬浮控制参数边界及优化研究 1337
电磁悬浮技术实现了高速工程化应用,代表了当前 现场测试数据,获取了典型轨道不平顺特征;继而,
磁浮列车发展的主流方向。由于电磁悬浮列车通过 建立包含左、右电磁铁与托臂结构耦合的最小悬浮
悬浮系统的精确反馈控制保持毫米级的悬浮间隙, 单元动力学模型,系统分析其模态特性与控制参数
随着运行速度的不断提升,特别是高速磁浮向时速 的稳定性边界;最后,以抑制振动与保持悬浮稳定为
600 km 推进,车辆与轨道之间的动态耦合效应日益 核心目标,采用多目标优化算法对控制参数进行协
显著,系统对轨道不平顺的敏感性也随之增加。因 同设计,以期为实现高速磁浮系统在复杂线路条件
此,在如此高的运行速度和复杂轨道扰动条件下,如 下的平稳、安全运行提供理论依据与设计参考。下
何保证控制性能和乘坐舒适性,成为磁悬浮系统设 文将围绕数据获取、模型建立、边界分析与参数优
计中的一项核心技术难题。 化这一研究路线逐一展开论述。
磁悬浮控制是磁浮车辆系统运行的核心环节。
近年来,围绕其强非线性、参数不确定性和外部扰 1 高 速 磁 浮 轨 道 不 平 顺
动等问题,研究者们提出了多种先进控制策略,包括
滑模控制、自适应控制、非线性鲁棒控制,以及融合 1.1 高速磁浮振动数据调查
模糊逻辑、神经网络等智能控制方法。这些方法在
理论分析和仿真中表现出良好的鲁棒性与适应性。 测试线路为上海高速磁浮示范线,全线为高架
例如,SUN 等 [1-2] 、CHEN 等 [3] 先后基于模糊滑模控 桥,选取龙阳路至浦东国际机场 15~20 km 区间的直
制、自适应滑模控制以及指数趋近律的滑模控制等 线段数据进行分析。 结合加速度传感器和激光位移
设计方法,提高了系统在扰动与时延条件下的稳定 传 感 器, 采 用 惯 性 基 准 法 获 取 高 速 磁 浮 轨 道 不 平
性和控制精度。XU 等 [4] 则设计了基于电流、电压反 顺。在车辆运行速度为 300 km/h 时,测量了左、右两
馈的控制结构,提升了系统建模与控制性能的实时 侧 悬 浮 电 磁 铁 的 加 速 度 和 悬 浮 气 隙, 采 样 频 率 为
性和适应性。为了抑制外部干扰,反步法 、H ∞ 、 1000 Hz,最低工作频率下限为 0.5 Hz。采用惯性基
[5]
[6]
自适应 [7-8] 等方法也被引入磁悬浮控制系统,进一步 准法获取轨道不平顺,具体可表示为:
w w
提升了控制系统的鲁棒性 [9-10] 。针对磁浮列车多点
δ = z−∆h = ¨ zdtdt −∆h (1)
耦合干扰与轨道不平顺激励,JIANG 等 [11] 提出了考
虑输入约束的时间同步控制器,结合双干扰观测器, 式中, z为加速度二次积分结果; ∆h为悬浮间隙变化量。
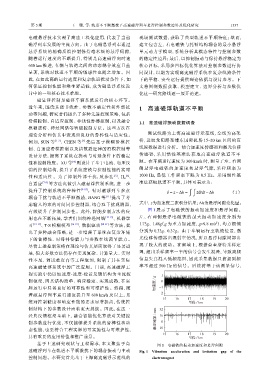
有效提升了控制同步性。此外,智能控制方法的应 图 1 展示了电磁铁的振动加速度和悬浮间隙。
用也在不断拓展,学者们围绕神经网络 [12-13] 、机器学 左、 右 两 侧 悬 浮 电 磁 铁 的 最 大 振 动 加 速 度 分 别 为
2
习 [14-15] 、T-S 模糊模型 [16-19] 、数据驱动 [20-21] 等方法,提 1.73g、1.48g(g 为重力加速度,g≈9.8 m/s ),均方根值
出了多种融合策略,进一步增强了系统在复杂环境 分别为 0.33g、0.37g。由于车辆运行至轨缝位置,激
下的鲁棒性、时滞补偿能力与参数在线调节能力。 光位移传感器出现射空情况,所以悬浮间隙局部出
尽管上述控制策略在理论与仿真层面取得了显著进 现了较大的波动。在频域上,根据奈奎斯特采样定
展,但大多数方法仍存在实现复杂、计算量大、实时 理,超出采样频率一半的信号会发生混叠,导致高频
性不足、调试难度高等工程瓶颈,限制了其在实际 信息失真混入低频范围,因此采集数据只捕捉到频
高速磁悬浮系统中的广泛应用。目前,高速磁浮工 率不超过 500 Hz 的信号。后续将基于该测量信号,
程实践中仍以加速度-速度-位置反馈结构为主流控 1
制框架,因其结构简单、响应稳定、实现成熟,在实 加速度 / g 0
际运行中具备良好的可靠性和可维护性。然而,随 −1
着磁悬浮列车运行速度提升至 600 km/h 及以上,系 −2
15 16 17 18 19 20
统对控制精度和响应性能的要求显著提高,传统控 里程 / km
制结构下的参数设计面临更大挑战。因此,在这一 32
经典反馈框架基础上,融合智能优化算法对关键控 16
制参数进行优化,不仅能够提升系统的鲁棒性和动 悬浮间隙 / mm 0
态性能,也更符合工程实际的可实施性与可维护性, −16
15 16 17 18 19 20
具有重要的应用价值和推广前景。 里程 / km
基于上述研究现状与工程需求,本文聚焦于高 图 1 电磁铁的振动加速度和悬浮间隙
速磁浮列车在轨道不平顺激扰下的耦合振动与主动 Fig. 1 Vibration acceleration and levitation gap of the
控制问题。本研究首先基于上海高速磁浮示范线的 electromagnet