
Page 134 - 《振动工程学报》2026年第5期
P. 134
1338 振 动 工 程 学 报 第 39 卷
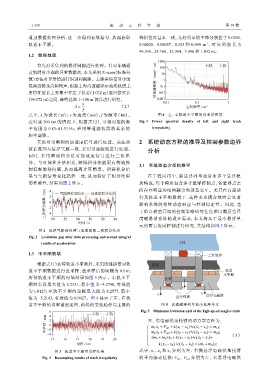
通过数据处理分析,进一步得到有效信号,从而获取 峰值位置基本一致,几处明显的主峰分别位于 0.0205、
轨道不平顺。 0.04028、 0.08057、 0.323 和 0.969 m , 对 应 的 波 长 为
−1
49.536、24.768、12.384、3.096 和 1.032 m。
1.2 数据处理
1000
首先对采集到的悬浮间隙进行处理。针对车辆通 100 右轨 左轨
过轨缝时出现的异常数据点,本文采用 Z-score(标准分 10
数)方法对异常值进行识别和剔除。去除采集信号中的 功率谱密度 / (mm 2 ·m) 1
低频趋势及高频噪声,根据上海高速磁浮示范线轨道主 0.1
要特征波长主要集中在定子铁芯(1.032 m)至四倍梁长 0.01
(99.072 m)之间,最终选取 1~100 m 波长进行研究。 0.001
v 0.01 0.1 1
λ = (2) 空间频率 / m −1
f
式中,λ 为波长(m);v 为速度(m/s);f 为频率(Hz)。 图 4 左、右轨道不平顺的功率谱密度
在时速 300 km 的情况下,根据式(2),可得对应的频 Fig. 4 Power spectral density of left and right track
率范围为 0.83~83.33 Hz,采用带通滤波器将其余的 irregularity
频率滤除。
其次对采集到的加速度信号进行处理。关注的 2 系 统 动 态 方 程 的 推 导 及 控 制 参 数 边 界
波长范围与悬浮气隙一致,采用带通滤波进行处理。 分 析
同 时, 采 用 频 域 积 分 法 对 加 速 度 信 号 进 行 二 次 积
分。与时域积分法相比,频域积分法能更有效地抑
2.1 系统动态方程的推导
制低频漂移问题,从而提高计算精度。所得积分结
果与气隙信号变化趋势一致,从而验证了积分结果 在工程应用中,磁悬浮列车通常由多个悬浮模
的准确性,结果如图 2 所示。 块构成,每个模块包含多个悬浮控制点,各悬浮点之
4 气隙预处理结果 加速度积分结果 间存在明显的结构耦合和动态交互。尤其在高速运
二次积分结果 / mm −2 2 0 行及轨道不平顺激扰下,这种多点耦合效应会显著
影响系统的整体动态响应与控制稳定性。因此,基
于单点模型开展的控制策略研究往往难以满足全尺
−4
50 52 54 56 58 60 度磁悬浮系统的设计需求,本文将基于最小悬浮单
时间 / s
元的两点协同控制进行研究,其结构如图 5 所示。
图 2 悬浮气隙预处理与加速度的二次积分结果
Fig. 2 Levitation gap after data processing and second integral
results of acceleration 车体
1.3 不平顺获取 二系悬挂
根据式(1)获得轨道不平顺后,采用线性插值对轨 轨道
道不平顺数据进行重采样,重采样后的间隔为 0.1 m, 轨道
不平顺
所得轨道不平顺的时域结果如图 3 所示。右轨不平 托臂
顺的全段最大值为 6.2331,最小值为−4.2740,有效值
x 3
为 1.0127;左轨不平顺的全段最大值为 8.2577,最小
x 2
x 1 悬浮电磁铁
值为−5.2143,有效值为 0.9427。图 4 展示了左、右轨 叠片弹簧
道不平顺的功率谱密度图,曲线的变化趋势与主要的 图 5 高速磁浮列车最小悬浮单元
6 4 右轨 左轨 Fig. 5 Minimum levitation unit of the high-speed maglev train
不平顺 / mm −2 2 0 左、右电磁铁及托臂的动力学方程为:
m 1 ¨x 1 + F m1 +k(x 1 − x 3 )+c(˙x 1 − ˙x 3 ) = m 1 g
m 2 ¨x 2 + F m2 +k(x 2 − x 3 )+c(˙x 2 − ˙x 3 ) = m 2 g
−4
(m 3 +m 4 ) ¨x 3 +k(x 3 − x 1 )+c(˙x 3 − ˙x 1 )+ (3)
15 16 17 18 19 20
里程 / km k(x 3 − x 2 )+c(˙x 3 − ˙x 2 ) = (m 3 +m 4 )g
图 3 轨道不平顺重采样结果 式中,x 1 、x 2 和 x 3 分别为左、右侧悬浮电磁铁和托臂
Fig. 3 Resampling results of track irregularity 的垂向振动位移;F m1 、F m 分别为左、右悬浮电磁铁
2