
Page 139 - 《振动工程学报》2026年第5期
P. 139
第 5 期 王 珊,等:轨道不平顺激扰下高速磁浮列车悬浮控制参数边界及优化研究 1343
10
正弦激扰,对应频率为车辆以时速 600 km 在 24.768 m
的轨道梁上高速运行,对比结果如图 10 所示。优化 0 优化解
对照组1
2
解对应的托臂加速度最大幅值为 6.85 m/s ,相较于其 加速度 / (m·s −2 ) 对照组2
他随机对照组更小;悬浮间隙在 10 mm 附近波动,优 −10
3.5 3.6 3.7 3.8 3.9 4.0
化解对应的悬浮间隙最大值为 13.3 mm,最小值为 时间 / s
6.7 mm,相对于 3 mm 的激扰幅值,振动尽管被放大 12
10%,但波动范围仍在±4 mm 安全可控范围内,相较 11
于其他随机对照组的波动幅值更小,且对该低频的 悬浮间隙 / mm 10
轨道不平顺表现出较好的跟随性;控制电流在 25 A
附近波动,优化解对应的控制电流最大值为 44.86 A, 9 3.5 3.6 3.7 3.8 3.9 4.0
最小值为 5.73 A,波动幅值相较于其他随机对照组更 时间 / s
大,以较好地调控悬浮间隙。整体来看,6.67 Hz 激 100
扰下优化解对应的振动响应最优,对照组 2 次之,对 电流 / A
照组 1 最差。 0
−100
10 优化解 3.5 3.6 3.7 时间 / s 3.8 3.9 4.0
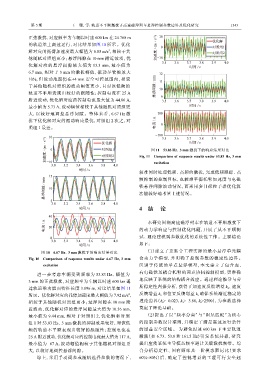
加速度 / (m·s −2 ) 0 对照组1 Fig. 11 Comparison of response results under 53.83 Hz, 3 mm
激扰下的响应结果对比
图 11 53.83 Hz、3 mm
对照组2
−10
3.0 3.2 3.4 3.6 3.8 4.0 excitation
时间 / s
较难同时处理低频、高频的激扰,完成低频跟踪、高
15 频抑制的控制目标,也较难平衡托臂加速度与电磁
悬浮间隙 / mm 10 铁悬浮间隙波动情况,而采用多目标粒子群优化算
法能较好地考量上述情况。
5
3.0 3.2 3.4 3.6 3.8 4.0
时间 / s 4 结 论
40
电流 / A 20 的动力学响应与控制优化问题,开展了从不平顺测
本研究围绕高速磁浮列车在轨道不平顺激扰下
试、理论建模到参数优化的系统性工作。主要结论
0
3.0 3.2 3.4 3.6 3.8 4.0
时间 / s 如下:
图 10 6.67 Hz、3 mm 激扰下的响应结果对比 (1)建立了更贴合工程实际的最小悬浮单元耦
Fig. 10 Comparison of response results under 6.67 Hz, 3 mm 合动力学模型,并明确了控制参数的稳定性边界。
excitation 区别于传统的单点悬浮模型,本文建立了包含左、
右电磁铁及耦合托臂的两点协同控制模型,更准确
进一步考虑车辆受到频率为 53.83 Hz、幅值为
地反映了系统的结构耦合效应。通过理论推导与劳
3 mm 的正弦激扰,对应频率为车辆以时速 600 km 通
斯稳定性判据分析,获得了加速度反馈增益 k a 、速度
过轨道梁功能面特征长度 3.096 m,对比结果如图 11
2
所示。优化解对应的托臂加速度最大幅值为 7.92 m/s , 反馈增益 k v 和位置反馈增益 k s 确保系统渐近稳定的
相较于其他随机对照组更小;悬浮间隙在 10 mm 附 理论边界(k a >−0.023,k v >−3.80,k s >2500),为参数选择
近波动,优化解对应的悬浮间隙最大值为 10.56 mm, 奠定了理论基础。
最小值为 9.44 mm,相对于对照组 2,优化解和对照 (2)提出了以“频率分离”与“阻尼匹配”为核心
组 1 对 53.83 Hz、3 mm 激扰的抑制效果较好,对该低 的控制参数设计准则,并确定了满足高速运行条件
频的轨道不平顺表现出较好的跟随性;控制电流在 的增益安全区域。 为避免时速 600 km 下主要轨道
25 A 附近波动,优化解对应的控制电流最大值为 117 A, 激励(如 6.73、53.8 和 161.5 Hz)引发系统共振,研究
最小值为−67 A,波动幅值相较于其他随机对照组更 提出应使系统主导模态频率避让关键激扰频带。综
大,以较好地调控悬浮间隙。 合分析稳定性、固有频率及一阶模态阻尼比(要求
综上,采用手动调参或随机选择参数的情况下, 60%~80%)后,确定了控制增益的工程可行安全起