
Page 15 - 《振动工程学报》2026年第2期
P. 15
第 2 期 周 衡,等:贝叶斯更新广义概率密度演化方程的桥梁健康监测数据动态预测 331
提出了一种使用 Kalman 滤波器和自回归积分移动 有周期趋势的非平稳性能信息的预测要求。因此,
平均广义自回归条件异方差相结合的时间序列预测 本研究旨在开发一种适用于带有周期性监测数据的
模型,提高了对桥梁结构变形的预测精度;XIN 等 [6] 动态预测模型,实现概率递推过程。本文基于动态
提出一种基于改进的变分模态分解和条件核密度估 线性模型(dynamic linear model,DLM)、概率密度演
计的数据驱动方法,用于预测监测变形数据,避免了 化理论和粒子滤波算法,提出一种滤波方法,即贝叶
理 解 结 构 行 为 演 变 的 复 杂 内 部 机 制 。DING 等 [7] 斯 更 新 广 义 密 度 演 化 滤 波( Bayesian updated genera-
基于长短期神经网络(LSTM)与经验模态分解,考虑 lized density evolution filter,BU-GDEF)方法。首先基
风速与风向的相关性对风力监测数据进行分析,从 于概率守恒原理,推导了动态系统状态和观测变量
而实现风向预测。TONELLI 等 [8] 基于预应力混凝土 的广义概率密度演化方程(GPDEE) [10] ,用于估计状
桥的监测数据,使用马尔可夫链蒙特卡罗(MCMC) 态变量的先验概率。然后通过贝叶斯公式和 DLM
方 法 进 行 贝 叶 斯 推 断, 进 一 步 评 估 结 构 可 靠 性 。 中的监测方程得出状态变量的后验概率分布,当有
LIU 等 [9] 基于监测到的非周期性数据,通过数据同化 新的监测数据可用时,可以继续递推,最终对监测变
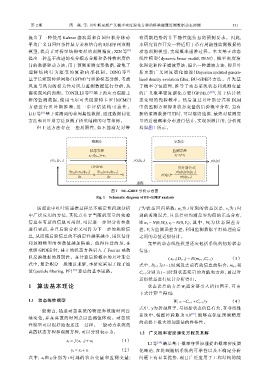
方法和贝叶斯方法预测了桥梁结构的可靠指标。 量的后验概率分布进行估计,实现预测目的,分析流
但上述方法存在一些局限性,如不能满足对带 程如图 1 所示。
预测步 更新步
状态方程 监测方程
y t =x t +v t
x t =f(x t−1 )+w t
p(x t−1 |y t−1 ) p(x t |y t−1 ) p(x t |y t )
GPDEE 贝叶斯公式
∂p xw (x,w t ,τ|y t−1 ) · ∂p xw (x,w t ,τ|y t−1 ) p(y t |x t )p(x t |y t−1 )
∂τ +x ∂x =0 p(x t |y t )= p(y t |y t−1 )
递推
图 1 BU-GDEF 分析示意图
Fig. 1 Schematic diagram of BU-GDEF analysis
该理论中贝叶斯递推过程是不确定性问题分析 f 为状态回归函数; w t 为 t 时刻的状态误差, v t 为 t 时
中广泛应用的方法,其优点在于当随机变量的先验 刻的监测误差,且误差项均满足零均值的正态分布,
信息在有新的信息可用时,可以进一步对分布参数 即 w t ∼ N(0,W t ),v t ∼ N(0,V t ), 其 中 , W t 为 状 态 误 差 方
进行更新,并且后验分布又可作为下一步的先验信 差, V t 为监测误差方差,利用监测数据平滑处理前后
息,从而使后验信息的不确定性越来越小,用以估计 之间的差值近似估计。
和预测模型的参数值越加精确。值得注意的是,在 完整的动态线性模型还应包括系统的初始状态
求解 GPDEE 时,建立的状态方程引入了 Fourier 函数 信息:
以反映数据的周期性。在计算后验概率的贝叶斯公 ( x t−1 |D t−1 ) ∼ N(m t−1 ,C t−1 ) (3)
式中,复杂积分一般难以求解,本研究采用了粒子滤 式中, D t−1 为 t −1时刻及之前有效信息的集合; m t−1 和
波(particle filtering,PF) [11] 算法的基本思路。 C t−1 分别为 t −1时刻状态变量的均值和方差,通过对
近似状态进行统计分析得出。
1 算 法 基 本 理 论 状态误差的方差 W t 通常要引入折扣因子,可由
下式计算 [12] 得到:
1.1 动态线性模型 W t = −C t−1 +C t−1 /γ (4)
式中, γ为折扣因子,与初始状态信息有关,在非线性
一般而言,描述动态系统的物理参数随时间连
系统中,根据经验取为 0.8 [13] ,能够在保证预测精度
续变化,并在离散的时间点以监测值体现。动态线
的前提下极大增加算法的鲁棒性。
性模型可以很好地表述这一过程。一般动力系统的
离散状态方程和观测方程,可以分别表示为: 1.2 广义概率密度演化方程及其解
(1)
x t = f(x t−1 )+w t [14]
LI 等 最早基于概率守恒原理提出概率密度演
(2) 化理论,在处理随机系统的可靠性以及不确定分析
y t = x t +v t
式中, x t 和 分别为 t 时刻的状态变量和监测变量; 问题上有显著优势,现已广泛应用于工程结构的随
y t