
Page 292 - 《振动工程学报》2025年第11期
P. 292
2750 振 动 工 程 学 报 第 38 卷
明此时的 SMR 周期解已失去稳定性。以上分析明 通过数值仿真来考察不同放大比 R 与失谐参数 σ组
确了 SMR 的充分条件:不仅需要足够的能量输入, 合下系统相空间的全局动力学演化特性。通过绘制
还必须将失谐参数 σ 控制在极小的范围内,以避免 一系列相轨迹来直观展示 R 和 σ的耦合作用,具体分
其他吸引子的出现,破坏 SMR 极限环的稳定性。 析如图 7 所示。
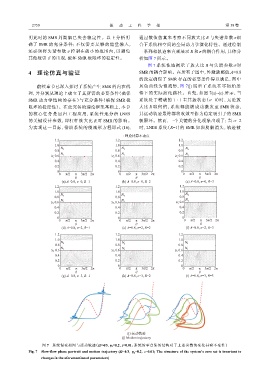
图 7 系统性地揭示了放大比 R 与失谐参数 σ对
4 理 论 仿 真 与 验 证 SMR 的耦合影响。在所有子图中,外激励幅值 A=0.8
的设定确保了 SMR 存在的必要条件得以满足,图中
前续章节已深入探讨了系统产生 SMR 的内在机 灰色曲线为慢流形,图 7(j) 展示了系统在零初始条
理,并分别从理论上确立了其所需的必要条件(确保 件下的实际演化路径。首先,如图 7(a)~(c) 所示,当
SMR 动力学结构的存在)与充分条件(确保 SMR 极 系统处于精确的 1∶1 主共振状态( σ=0)时,无论放
限环的稳定性)。在此完备的理论框架基础上,本节 大比 R 取何值,系统都能被成功激发至 SMR 状态,
的核心任务是回归工程应用,系统性地分析 LNES 其运动轨迹最终都将收敛至作为稳定吸引子的 SMR
的关键设计参数,即杠杆放大比 R 对 SMR 的影响。 极限环。然而,一个关键的分化现象出现了:当 σ=2
为实现这一目标,借助系统的慢流形方程即式 (16), 时,LNES 系统(R=1)的 SMR 如预期般消失,轨迹被
理论计算不动点
1.2 1.2 1.2
1.0 1.0 1.0
N 2 N 2 N 2
0.8 0.8 0.8
N 0.6 N 1 N 0.6 N 1 N 0.6 N 1
0.4 0.4 0.4
0.2 0.2 0.2
0 0 0
0 π/2 π 3π/2 2π 0 π/2 π 3π/2 2π 0 π/2 π 3π/2 2π
θ θ θ
(a) A=0.8, σ=0, R=1 (b) A=0.8, σ=0, R=2 (c) A=0.8, σ=0, R=3
1.2 1.2 1.2
1.0 1.0 1.0
N 2
N 2 N 2
0.8 0.8 0.8
N 1
N 1
N 1
N 0.6 N 0.6 N 0.6
0.4 0.4 0.4
0.2 0.2 0.2
0 0 0
0 π/2 π 3π/2 2π 0 π/2 π 3π/2 2π 0 π/2 π 3π/2 2π
θ θ θ
(d) A=0.8, σ=2, R=1 (e) A=0.8, σ=2, R=2 (f) A=0.8, σ=2, R=3
1.2 1.2 1.2
1.0 1.0 1.0
N 2 N 2 N 2
0.8 0.8 0.8
N 0.6 N 1 N 0.6 N 1 N 0.6 N 1
0.4 0.4 0.4
0.2 0.2 0.2
0 0 0
0 π/2 π 3π/2 2π 0 π/2 π 3π/2 2π 0 π/2 π 3π/2 2π
θ θ θ
(g) A=0.8, σ=3, R=1 (h) A=0.8, σ=3, R=2 (i) A=0.8, σ=3, R=3
(j) 运动轨迹
(j) Motion trajectory
图 7 系统慢变相图与运动轨迹(Ω=4/3,η 2 =0.2,ε=0.01;系统的零点集的结构对于上述参数的变化具有不变性)
Fig. 7 Slow-flow phase portrait and motion trajectory (Ω=4/3, η 2 =0.2, ε=0.01; The structure of the system’s zero set is invariant to
changes in the aforementioned parameters)