
Page 38 - 《振动工程学报》2025年第9期
P. 38
1968 振 动 工 程 学 报 第 38 卷
装备性能产生显著影响,进行车辆在路面不平顺激 车辆和结构的动力学模型,由连接位置处相容关系,
励下的振动分析对于研究车辆动力学控制和优化具 得到系统动力学方程 [12] :
有重要意义 [1-2] 。 M(ε) ¨ y+C(ε) ˙ y+ K(ε) y = K q x(t) (1)
在车辆的加工、制造和测试过程中,工艺误差、 式中, M C K为系统的质量矩阵、阻尼矩阵和刚
、 、
测量误差等客观存在,分析这些不确定因素对车辆 度矩阵; 、 ˙、
¨ y y y为系统的绝对加速度、绝对速度和
稳定性控制、优化设计的影响,是车辆系统动力学 绝对位移向量; x(t)为作用在系统上的路面位移激励
研究的一项重要课题 [3-5] 。MOGHADAM 等 研究了 向量; K q 为对应的变换矩阵,将路面位移激励转换为
[6]
车辆悬架不确定模型的随机滑模控制器设计,并对
力激励输入系统; ε为系统不确定性参数向量,可以
随机滑模控制方法的有效性进行了仿真验证;智鹏 T
表达为 ε = {ε 1 ,ε 2 ,ε 3 ,··· ,ε N } 。对于具有不确定参数
鹏 [7] 考虑了车辆结构参数与荷载条件的不确定性,
的系统,质量矩阵、阻尼矩阵和刚度矩阵都化为包
从结构可靠性和优化设计两个方面开展了车辆结构
含 ε的随机矩阵。
的设计方法研究,对现有的不确定性分析和优化理
论进行拓展完善。由于不确定性的客观存在,车辆 p点
a点
动力学理论分析所采用的结构参数并不是实际值, b点
将不确定参数进行概率建模并对输出响应进行统计 y v
K c1 C c1 K c2
C c2
学分析量化求解,也是构建实际车辆数字孪生的必要
基础。 θ v
不确定性量化(uncertain quantification, UQ)是概 K s1 C s1 K s2 C s2
率统计与相关工程科学的结合 。目前已经发展出 y 1 y 2
[8]
m 1 m 2
多种分析方法,包括蒙特卡罗方法、摄动法、概率密
K t1 K t2
度演化法和多项式展开法。蒙特卡罗方法 (Monte
Carlo method, MC) 理论上可以解决任何随机问题,但 x 1 (t) x 2 (t)
是需要大样本数据分析;摄动法具有较高的计算效
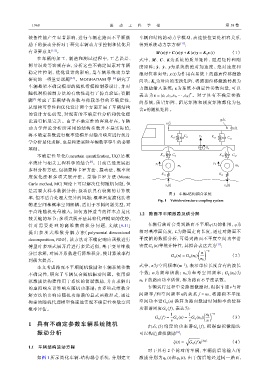
图 1 车辆-结构耦合系统
率,但不适合处理大变异的问题;概率密度演化法将
Fig. 1 Vehicle-structure coupling system
物理空间和概率空间解耦,适用于不同问题类型,对
于高维随机变量输入,如何选择适当的样本点是比 1.2 路面不平顺激励及谱分解
较关键的环节;多项式展开法具有代理模型的优势,
针 对 需 要 处 理 的 高 维 数 值 积 分 问 题, 文 献 [9-11] 车辆行驶时会受到路面不平顺 q(L)的作用, q为
提 出 多 项 式 维 数 分 解 方 法( polynomial dimensional 相对基准面高度, L为路面走向长度,通过对路面不
decomposition, PDD),该方法对不确定响应函数进行 平度值的数据分析,可得到路面不平度空间功率谱
傅里叶多项式展开后进行多元近似,基于变量维数 密度 G q (n)等统计特性,其拟合表达式为 [13] :
( ) −w
分层求解,对展开系数进行降维积分,使计算效率得 n
G q (n) = G q (n 0 ) (2)
到极大提高。 n 0
本文考虑路面不平顺随机激励和车辆系统参数 式中, n为空间频率 ( m −1 ) ,表示单位长度含有的波长
不确定性,研究了车辆复合随机振动问题。使用虚 个 数; w为 频 率 指 数 ; n 0 为 参 考 空 间 频 率 ; G q (n 0 )为
拟激励法构建作用于系统的简谐激励,并由求解出 n 0 下的路面功率谱值,称为路面不平度系数。
的虚拟响应计算响应随机功率谱;由多项式维数分 车辆运行过程中受路面激励时,根据车速 v与时
解方法给出响应随机功率谱的显式函数形式,通过 间频率 f 和空间频率 n的关系 f = nv,将路面不平度
构建的随机代理模型快速地实现不确定性参数空间 空间功率谱 G q (n) 换算为路面激励时间频率的位移
概率评估。 功率谱密度 G q ( f),表达为:
1 1 ( n 0 ) −w
G q ( f) = G q (n) = G q (n 0 ) (3)
v v n
1 具 有 不 确 定 参 数 车 辆 系 统 随 机 由式 (3) 给定的功率谱 G q ( f),根据虚拟激励法
振 动 分 析 可以构造虚拟激励 [14] :
√
˜ q(t) = G q ( f)e (4)
i2πft
1.1 车辆结构运动方程
对于具有 2 个轮对的车辆,车辆前后轮输入的
如图 1 所示简化车辆-结构耦合系统,分别建立 激励分别为 q 1 (t)和 q 2 (t),由于前后轮经过同一路面,