
Page 160 - 《振动工程学报》2025年第9期
P. 160
2090 振 动 工 程 学 报 第 38 卷
c r1 方程 [17] 可以导出转子系统的运动方程为:
k r1
(1)
M¨ u+ΩG˙ u+C˙ u+ Ku = F e + F i
z
i y 式中, M G C和 K分别表示质量矩阵、陀螺矩阵、
、 、
Ω ψ i O
i
b 阻尼矩阵和刚度矩阵,表达式见附录 A 中式(A1)~
x
O θ i (A4); F e 为由动能导出的由各圆盘质量不平衡引起
i
L M v
1 1 1
的激励矢量,表达式见式(A5); F i 表示转子 2 与静子
之间的作用力,表达式见式(A6);u 为静止坐标下的
g d
1
转子1 位移矢量,表达式为:
c r2 [ ] T
u = ψ 1 θ 1 ψ 2 θ 2 (2)
k r2 转子 2 在静子长度 a处的径向位移表达式为:
转子2 [ ] 2 2
2
r = L 1 ψ 1 +(L 2 −a)ψ 2 +[L 1 θ 1 +(L 2 −a)θ 2 ] (3)
k s 将运动方程从静止坐标系向旋转坐标系变换 [18] :
k s
L 2 u = T ˜ u (4)
c 式中, ˜ u为旋转坐标系中的向量; T为变换矩阵,定
a
义为:
M 2 cos(Ωτ) −sin(Ωτ) 0 0
sin(Ωτ) cos(Ωτ) 0 0
d
2 T =
v 0 0 cos(Ωτ) −sin(Ωτ)
2
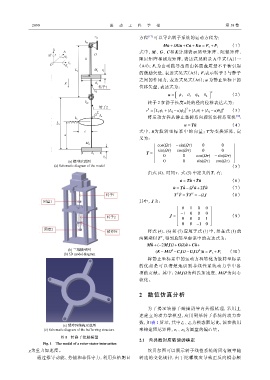
(a) 模型示意图 0 0 sin(Ωτ) cos(Ωτ)
(a) Schematic diagram of the model (5)
由式 (4)、时间 τ、式 (5) 中定义的 T,有:
˙
˙ u = T ˙ ˜ u+T ˜ u (6)
˙
2
¨ u = T ¨ ˜ u−Ω ˜ u+2T ˙ ˜ u (7)
T ˙
˙
T
转子1 T T = TT = −ΩJ (8)
圆盘1 其中, J为:
0 1 0 0
−1 0 0 0
转子2 J = 0 (9)
0 0 1
0 0 −1 0
圆盘2
缓冲环 将式 (4)、(6) 和 (7) 应用于式 (1) 中,并在式 (1) 的
两侧乘以 T ,得到旋转坐标系中的表达式为:
T
M ¨ ˜ u+(−2MJΩ+GΩ) ˙ ˜ u+C ˙ ˜ u+
(b) 三维模型图 2 2 (10)
(K − MΩ −CJΩ−GJΩ )˜ u = F e + F i
(b) 3D model diagram
将静止坐标系中的运动方程转化为旋转坐标系
的优点是可以清楚地识别非线性系统动力学中各
项的贡献。其中: 2MJΩ为科氏加速度, MΩ 为向心
2
软化。
2 数 值 仿 真 分 析
为了揭示转静子碰撞诱导内共振机理,采用上
述建立的动力学模型,应用到某转子系统的动力参
ζ 1 ζ 2 为模态阻尼比,该参数用
数,如表 1 所示,其中 、
(c) 缓冲环结构示意图
、
(c) Schematic diagram of the buffer ring structure 来构建阻尼矩阵, ε 1 ε 2 为圆盘的偏心量。
图 1 转静子接触模型
2.1 内共振对应转速的确定
Fig. 1 The model of a rotor-stator interaction
g为重力加速度。 坎贝尔图可以展示转子线性系统的固有频率随
通过推导动能、势能和非保守力,利用拉格朗日 转速的变化规律,由于陀螺效应导致正反向模态频