
Page 155 - 《振动工程学报》2025年第9期
P. 155
第 9 期 邓振鸿,等:带初始弯曲柔性转子的高阶无附加试重平衡法 2085
一种估计值,其真实值是无法准确获取的,因此,需
光电传感器 电机控制器 数据采集
要考虑临界参数的不确定性对所提方法的影响。假 设备
设估计得到的临界转速存在±5% 的误差,阻尼比存
在±50% 的不确定性,采用蒙特卡罗仿真 100 次,统 弯曲柔性轴 计算机
计出运行转速域内(0~6000 r/min)各测点位移响应的
最大幅值的均值和变化范围如图 7 所示。可以看
电机 联轴器
出,对于两种弯曲模式,其最大幅值的平均值相比于
电涡流位移传感器
平衡前的最大幅值均显著下降,且统计出的最大值 力锤
也明显低于平衡前的结果,因此在考虑一定的参数 图 8 转子试验台及数据采集设备
不确定下,本文所提方法仍具有很好的平衡效果。 Fig. 8 Rotor test rig and data acquisition device
平衡前 提出的方法 表 3 试验转子的前 2 阶固有频率与阻尼比
0.07 Tab. 3 The first two natural frequencies and damping ratios of
0.06 the experimental rotor model
模态阶次 固有频率/Hz 阻尼比/%
0.05
最大幅值 / m 0.04 1阶 25.2 0.012
0.03
2阶
81.4
0.011
0.02
0.01 阻尼比如表 3 所示。与仿真案例中类似,采用圆盘 1
0 和 作为平衡面。在平衡第 阶临界转速时,将转
测点1 测点2 测点3 3 1
(a) 初始弯曲变形模式1 子运行至 800、900、1000、1100、1200、1300 r/min,并
(a) Initial bending deformation pattern 1
拾取稳态下的同步响应,并按照 1.3 节介绍的低速动
0.07
平衡方法分别采用圆盘 1 和 3 进行平衡。将平衡后
0.06
各测点的位移响应幅值与平衡前以及影响系数法
0.05
最大幅值 / m 0.04 (1300 r/min 下测量)进行对比,结果如图 9 所示。可
以看出,平衡前转子在临界转速附近的振动响应急
0.03
0.02
0.01 剧增大,其中,在第 1 阶临界转速处振动略微超过了
阶临界转速时由于振
传感器的限制值,在靠近第
2
0
测点1 测点2 测点3 动过大而停车;影响系数法在第 1 阶临界转速处起
(b) 初始弯曲变形模式2 到了一定的振动抑制作用,但靠近第 2 阶临界转速
(b) Initial bending deformation pattern 2
的幅值响应仍然很高,无法跨过第 2 阶临界转速;对
图 7 参数不确定性影响下的最大幅值统计结果对比
于低速动平衡法,无论是采用圆盘 1 还是 3,其在第 1
Fig. 7 Comparison of maximum amplitude statistics under the
阶临界转速的平衡效果都十分显著,且均优于影响
influence of parameter uncertainty
系数法,但仍无法跨过第 2 阶临界转速。
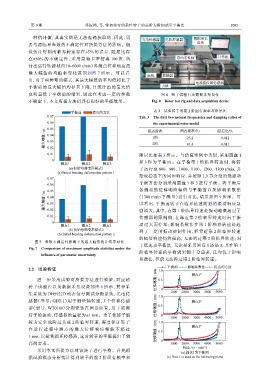
2.2 试验验证 1.0 平衡前 影响系数法 提出的方法
位移幅值 / mm
测点1
进一步采用试验对所提方法进行验证,对应的 0.5 #
转子试验台以及数据采集设备如图 8 所示,其中采 0
集系统为 DH5922D 动态信号测试分析系统,光电传 1.0 1000 2000 3000 4000 5000
感器(型号:GDT-1)用于测量轴转速,3 个位移传感 测点2 #
器(型号:WT0180)分别安装在圆盘位置,用于监测 位移幅值 / mm 0.5
转子的振动,传感器的量程为±1 mm。为了使转子能 0 1000 2000 3000 4000 5000
较为安全地跨过其前 2 阶临界转速,需要保证转子 1.0
在 运 行 过 程 中 测 点 的 最 大 位 移 响 应 幅 值 不 超 过 位移幅值 / mm 0.5 测点3 #
1 mm,以避免损坏传感器,这对转子的平衡提出了较
高的要求。 0 1000 2000 3000 4000 5000
−1
转速 / (r·min )
采用本文所提方法对该转子进行平衡。首先根
(a) 圆盘1为平衡面
据试验模态分析估计得到转子的前 2 阶固有频率和 1.0 (a) Disc 1 is used as the balancing plane
位移幅值 / mm 测点1
1.0 1000
测点
位移幅值
1.0 1000
测点
位移幅值
1000
转速 · −1
(b) 圆盘 为平衡面
(b) Disc 3 is used as the balancing plane