
Page 154 - 《振动工程学报》2025年第9期
P. 154
提出的方法
−1
−3
位移幅值
−5
3000
−1
测点
−3
位移幅值
−5
5000
3000
−1
0.05
测点3
−3 平衡前 0.05 影响系数法 测点 5000
位移幅值 −5
3000 5000
转速 · −1
2084 振 动 工 程 学 报 第 38 卷
初始弯曲变形模式
×10 −5 10 −2 0.04 测点1 #
初始变形量 / m 10 5 0 位移幅值 / mm 10 −4 0.01
15
−5
1 2 3 4 5 6 7 8 9 10111213141516171819 1000 2000 3000 4000 5000 6000
节点 0.05
(a) 假设的转子初始弯曲变形模式1 10 −2 测点2 #
(a) Assumed initial bending deformation 位移幅值 / mm −4 0.01
pattern 1 of the rotor 10 1000 2000 3000 4000 5000 6000
−4
×10
1.0
初始变形量 / m −0.5 0 位移幅值 / mm 10 −2 0.04 测点3 #
0.5
0.01
−4
−1.0
1 2 3 4 5 6 7 8 9 10111213141516171819 10 1000 2000 3000 4000 5000 6000
节点 −1
转速 / (r·min )
(b) 假设的转子初始弯曲变形模式2
(b) 初始弯曲变形模式2
(b) Assumed initial bending deformation
pattern 2 of the rotor (b) Initial bending deformation pattern 2
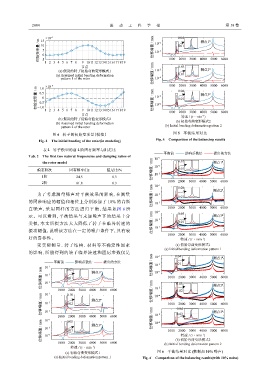
图 4 转子的初始变形量(模拟) 图 5 平衡结果对比
Fig. 4 The initial bending of the rotor(in modeling) Fig. 5 Comparison of the balancing results
表 2 转子模型的前 2 阶固有频率与阻尼比
平衡前 影响系数法 提出的方法
Tab. 2 The first two natural frequencies and damping ratios of 10 −1
the rotor model 0.05 测点1 #
10 −3
模态阶次 固有频率/Hz 阻尼比/% 位移幅值 / mm −5 0.01
1阶 24.5 0.3 10
2阶 81.8 0.3 10 −1 1000 2000 3000 4000 5000 6000
位移幅值 / mm 0.01
0.08
为了考虑测量噪声对平衡效果的影响,在测量 10 −3 测点2 #
的同步响应的幅值和相位上分别添加了 10% 的高斯 10 −5
白噪声,采用同样的方法进行平衡,结果如图 6 所 10 −1 1000 2000 3000 4000 5000 6000
示。可以看到,平衡结果与未加噪声下的结果十分 −3 0.05 测点3 #
类似,本文所提方法大大降低了转子在临界转速的 位移幅值 / mm 10 −5 0.01
振动幅值,说明该方法在一定的噪声条件下,具有较 10
1000 2000 3000 4000 5000 6000
好的鲁棒性。 转速 / (r·min )
−1
受实际测量、转子结构、材料等不确定性因素 (a) 初始弯曲变形模式1
(a) Initial bending deformation pattern 1
的影响,所能得到的转子临界转速和阻尼参数仅是 −1 0.04
10 测点1 #
平衡前 0.05 影响系数法 提出的方法 位移幅值 / mm 10 −3 0.01
−1
10
位移幅值 / mm 10 −3 0.01 测点1 # 10 −5 1000 0.06 3000 4000 5000 6000
2000
−5
10
2000
1000 0.10 3000 4000 5000 6000 位移幅值 / mm 10 −2 0.02 测点2 #
−1
位移幅值 / mm 10 −3 0.02 测点2 # 1000 0.04 3000 4000 5000 6000
10
−4
10
2000
−5
10
1000 0.05 3000 4000 5000 6000 位移幅值 / mm 10 −2 0.02 测点3 #
2000
−1
10
位移幅值 / mm 10 −3 0.01 测点3 # 1000 2000 3000 4000 5000 6000
−4
10
−1
−5
转速 / (r·min )
10
(b) 初始弯曲变形模式2
1000 2000 3000 4000 5000 6000 (b) Initial bending deformation pattern 2
−1
转速 / (r·min )
图 6 平衡结果对比 (数据加 10% 噪声)
(a) 初始弯曲变形模式1
(a) Initial bending deformation pattern 1 Fig. 6 Comparison of the balancing results(with 10% noise)
位移幅值 / mm −2 测点
−4
0.05 3000 5000
−2 测点
位移幅值 −4
3000 5000
测点3
−2
位移幅值 −4
3000 5000
转速 · −1
初始弯曲变形模式