
Page 153 - 《振动工程学报》2025年第9期
P. 153
第 9 期 邓振鸿,等:带初始弯曲柔性转子的高阶无附加试重平衡法 2083
[
ψ N (x s ) (N) ψ N (x s )
N ∑ 同时,为了不破坏前 N−1 阶的平衡,还需要满足:
ψ N (x i )λ = u N +
i N ∑ ψ r (x s )
m N m N (N) (14)
i=1 ψ r (x i )λ i = 0
N−2,N ] i=1 m r
∑
( ) (N−1) ψ N (x s ) b N
λ + (13) 将式 (13) 和 (14) 整理成矩阵的形式,可以得到
ψ N x T i
T i ω 2
m N
i=1 N
平衡前 N 阶临界转速所需要的配重量为:
ψ 1 (x s ) ψ 1 (x s ) ψ 1 (x s )
−1
ψ 1 (x 1 ) ψ 1 (x 2 ) ··· ψ 1 (x N )
0
m 1 m 1 m 1
λ 1
ψ 2 (x s ) ψ 2 (x s ) ψ 2 (x s ) 0
ψ 2 (x 1 ) ψ 2 (x 2 ) ···
λ 2 ψ 2 (x N )
.
m 2 m 2 m 2 .
. =
.
. . . . .
. . . . . ( )
. . . . N−2,N
ψ N (x s )
∑ (N−1) ψ N (x s ) b N
ψ N (x s ) ψ N (x s ) ψ N (x s ) ψ N (x T i T i 2
λ N u N + )λ +
ω
ψ N (x 1 ) ψ N (x 2 ) ··· ψ N (x N ) m N i=1 m N N
m N m N m N
(15)
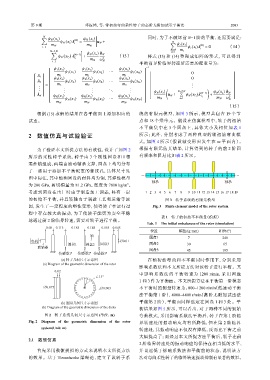
根据 (15) 求解的结果在各平衡面上添加相应的 统的有限元模型,如图 3 所示,模型共包含 19 个节
试重。 点和 18 个梁单元。假设在仿真模型中,转子的初始
不平衡集中在 3 个圆盘上,具体大小及相位如表 1
2 数 值 仿 真 与 试 验 验 证 所示;此外,分别考虑了两种典型的轴初始弯曲模
式,如图 4 所示(假设轴变形只发生在 xz 平面内)。
为了验证本文所提方法的有效性,设计了如图 2 根据有限元仿真结果,计算得到的转子的前 2 阶固
所示的柔性转子系统,转子由 3 个刚性圆盘和 1 根 有频率和阻尼比如表 2 所示。
柔性轴组成,两端由滚动轴承支撑,圆盘上均匀分布
了一些用于添加不平衡配重的螺纹孔,具体尺寸见
图中标注,其中轴和圆盘的材料均为钢,其弹性模量
轴承 轴承
为 200 GPa,剪切模量为 81.2 GPa,密度为 7810 kg/m 。
3
考虑到圆盘在出厂时由于制造加工误差,具有一定 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
的初始不平衡,并且转轴由于制造工艺和运输等原 图 3 转子系统的有限元模型
因,发生了一定程度的塑性变形,使得转子在运行过 Fig. 3 Finite element model of the rotor system
程中存在较大的振动,为了使转子能更为安全平稳
表 1 转子的初始不平衡量(模拟)
地通过前 2 阶临界转速,需要对转子进行平衡。
Tab. 1 The initial unbalances of the rotor (simulation)
0.08 0.115 0.185 0.145 0.155 0.045
位置 幅值/(g·mm) 相位/(°)
轴
圆盘1 7 240
电机 ∅0.01
圆盘1 圆盘2 圆盘3 圆盘2 30 65
联轴器
圆盘3 45 195
传感器1 # 传感器2 # 传感器3 #
(a) 转子几何尺寸示意图 在轴初始弯曲和不平衡同时作用下,分别采用
(a) Diagram of the geometric dimension of the rotor
影响系数法和本文所提方法对该转子进行平衡。其
0.02
中 影 响 系 数 法 的 平 衡 转 速为 1200 r/min, 采 用 圆 盘
∠15°
1 和 3 作为平衡面。本文所提方法在平衡第一阶模态
∅0.075 ∅0.003 不平衡时的测量转速为:800~1200 r/min(低速动平衡
法平衡第 1 阶),4000~4400 r/min(高阶无附加试重法
平衡第 2 阶),平衡面同样选定在圆盘 1 和 3 处。平
(b) 圆盘几何尺寸示意图
(b) Diagram of the geometric dimension of the disks
衡结果如图 5 所示,可以看出,对于两种不同的初始
图 2 转子系统几何尺寸示意图 (单位:m) 弯曲模式,采用影响系数法平衡后,转子在第 1 阶临
Fig. 2 Diagram of the geometric dimension of the rotor 界转速处的振动响应均有所降低,但在第 2 阶临界
system(Unit: m)
转速处,其振动响应不仅没有降低,反而比平衡之前
大幅提高了;而经过本文所提方法平衡后,转子在前
2.1 数值仿真
2 阶临界转速处的振动响应均保持在相当低的水平,
首先采用数值模拟的方式来说明本文所提方法 并且远低于影响系数法和平衡前的状态,说明该方
的效果。基于 Timoshenko 梁理论,建立了该转子系 法对弯曲柔性转子的临界转速振动抑制有显著的效果。