
Page 183 - 《振动工程学报》2025年第8期
P. 183
第 8 期 林晓祥,等: 一种考虑时滞的结构显式最优控制方法 1823
情况下的效果。相比而言,TD‑EOC 所得顶层位移
峰值仅随着时滞的增大而缓慢增大。以图 5 所示
El‑Centro 波 作 用 下 的 顶 层 位 移 峰 值 为 例 ,在 t D ≤
0.48 s ( λ = 24 )时,TD‑EOC 的控制效果仍然可以达
到无时滞控制效果的 30% 以上,这充分说明了本文
提出的 TD‑EOC 方法的有效性。
此外,从图 5~7 中还可以看出,NC‑EOC 会出现
高控制力水平(θ = 7.5)的顶层位移峰值超过低控制
力水平(θ = 7.0)的现象,而 TD‑EOC 在高控制力水
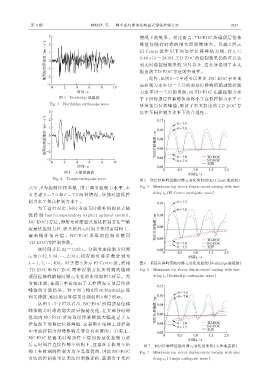
图 3 Northridge 地震波 平下所得顶层位移峰值始终小于在低控制力水平下
Fig. 3 Northridge earthquake wave 所得顶层位移峰值,验证了本文提出的 TD‑EOC 方
法在不同控制力水平下的合理性。
图 4 天津地震波
Fig. 4 Tianjin earthquake wave 图 5 顶层位移峰值随时滞 t D 变化的曲线(El‑Centro 地震波)
式中, θ 为控制律权参数,用于调节控制力水平,本 Fig. 5 Maximum top‑storey displacement varying with time-
文考虑 θ = 7.0 和 θ = 7.5 两种情况,分别对应低控 delay t D (El‑Centro earthquake wave)
制力水平和高控制力水平。
为了进行对比,同时考虑无时滞补偿的显式最
优 控 制(non‑compensatory explicit optimal control,
NC‑EOC)方法,即按无时滞显式最优控制方法 [22] 确
定最优控制力后,将其延后 t D 时间并作用至结构上,
而 未 做 任 何 补 偿 。 NC‑EOC 所 取 的 控 制 参 数 同
TD‑EOC 的控制参数。
取时间步长 Δt = 0.02 s。分别考虑控制力时滞
t D 为 0.02、0.04、⋯、2.00 s,相 应 的 时 滞 步 数 分 别 为
λ = 1,2,⋯,100。对于图 2 所示 El‑Centro 波,采用 图 6 顶层位移峰值随时滞 t D 变化的曲线(Northridge 地震波)
TD‑EOC 和 NC‑EOC 两种控制方法所得到的结构 Fig. 6 Maximum top‑storey displacement varying with time-
顶层位移峰值随时滞 t D 变化的曲线如图 5 所示。为 delay t D (Northridge earthquake wave)
方便比较,在图 5 中还给出了无控情况下顶层位移
峰值的计算结果。对于图 3 和 4 所示 Northridge 波
和天津波,相应的计算结果分别如图 6 和 7 所示。
从图 5~7 中可以看出,NC‑EOC 所得顶层位移
峰值随着时滞的增大而呈振荡变化,在大部分时滞
范围内 NC‑EOC 所得顶层位移峰值大幅超过了无
控情况下的顶层位移峰值,这表明在结构主动控制
中考虑控制力时滞影响是非常有必要的。事实上,
NC‑EOC 是将无时滞条件下得到的最优控制力延
后 t D 时间并直接作用至结构上,这意味着作用至结 图 7 顶层位移峰值随时滞 t D 变化的曲线(天津地震波)
构上各时刻的控制力均不是最优的,因此 NC‑EOC Fig. 7 Maximum top‑storey displacement varying with time-
方法的控制效果是无法得到保证的,甚至劣于无控 delay t D (Tianjin earthquake wave)