
Page 477 - 《软件学报》2025年第4期
P. 477
李庚松 等: 无人机多传感器数据融合研究综述 1883
(2) 动力系统, 提供无人机飞行和稳定所需的动力, 包括电动机、内燃机等供能来源, 螺旋桨、固定翼等推进
结构, 以及电机、电子调速器等动力控制组件 [17] .
(3) 飞行控制系统, 是无人机的核心部分, 其上搭载飞行控制程序, 通过 IMU、GNSS、高度计等传感器获取
状态测量, 对无人机的航向、速度、高度等信息进行实时的监测估计, 并根据指令向动力系统发出控制信号, 调整
无人机的动力和姿态 [20] .
(4) 机载计算机, 也称为上位机, 通过在该计算机上部署目标检测、路径规划、自主避障等人工智能算法对传
感器数据进行融合分析, 可以代替地面遥控给出控制决策, 使无人机具备更强的自主能力 [21] .
(5) 通信链路, 是无人机与地面站、卫星及其他无人平台进行信息接收、分发与共享的关键模块 [1] . 目前常见
的通信方式包括无线电、无线数传、无线局域网、卫星通信等.
(6) 任务载荷, 指的是无人机为了执行给定任务而搭载的传感器. IMU 以及辅助 IMU 进行状态测量的传感器
是无人机稳定飞行所不可缺少的组件, 而任务载荷是根据任务目标和实际条件选择性搭载的传感器, 例如, 针对航
拍摄影任务选择可见光相机、针对环境三维建模选用 LiDAR 或深度相机、针对地面遥感选用多光谱或超光谱相
机等. 不同任务载荷的功能长处各不相同, 所产生的数据存在一定互补性, 对多种任务载荷进行数据融合, 从而获
基于
取全面的目标信息, 是目前常见的手段 [6] .
1.2 地面站
地面站是无人机系统的指挥控制和信息处理中心, 主要包括控制系统、显示系统和通信链路模块, 为操控人员
提供无人机飞行控制、状态监控、任务规划等功能 [22] . 地面站通过控制系统向无人机发出命令, 利用通信链路接收
无人机返回的自身位姿、目标信息、传感器工作状态等数据, 执行数据融合流程, 并通过显示系统将结果展示给操
作人员. 随着上位机的使用与发展, 部分数据融合任务逐渐转移至上位机完成, 以实现更高的实时性和自主性 [23] .
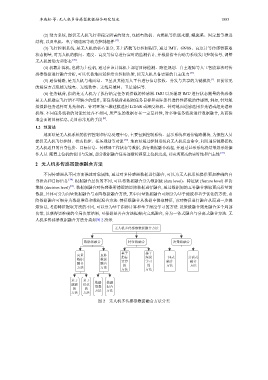
2 无人机多传感器数据融合方法
不同传感器从不同方面描述对象属性, 通过对多传感器数据进行融合, 可以为无人机系统提供更加准确的自
身状态和目标信息 [24] . 根据融合层次的不同, 可以将数据融合分为数据级 (data level)、特征级 (feature level) 和决
策级 (decision level) [25] . 数据级融合对传感器所捕捉的原始数据进行融合, 通过数据间的互补融合获取更高质量的
数据, 具体可分为向量数据融合与点阵数据融合方法, 其中向量数据融合可细分为基于滤波和基于优化的方法, 点
阵数据融合可细分为数据堆叠和数据混合方法. 特征级融合从数据中提取特征, 再对特征进行融合从而进一步提
炼信息, 考虑特征提取方法的不同, 可以分为基于指标计算和基于深度学习的方法. 决策级融合则是融合多个局部
决策, 以获得更准确的全局决策结果, 可根据是否在方法框架内完成融合, 分为一体式融合与分离式融合方法. 无
人机多传感器数据融合方法分类如图 2 所示.
无人机多传感器数据融合方法
数据级融合 特征级融合 决策级融合
基于
向量 点阵 指标 深度 一体式 分离式
数据 数据 计算 学习 融合 融合
融合 融合 的 的 方法 方法
方法 方法
方法 方法
基于 基于 数据 数据
滤波 优化 堆叠 混合
的 的 方法 方法
方法 方法
图 2 无人机多传感器数据融合方法分类