
Page 478 - 《软件学报》2025年第4期
P. 478
1884 软件学报 2025 年第 36 卷第 4 期
2.1 数据级数据融合
根据数据格式的不同, 可将传感器的原始数据分为向量数据和点阵数据. 向量数据中的元素主要是状态感知
信息 (如无人机的旋转角、速度等) 和对应的状态感知误差, 各元素可以任意排列而不影响其所表达的信息; 点阵
数据以成像传感器捕捉的目标观测图像和点云数据为主, 其中元素的信息表达依赖于其空间排列属性. 针对这 2
种数据的融合方法存在一定区别, 因此, 将数据级融合细分为向量数据融合方法与点阵数据融合方法.
2.1.1 向量数据融合方法
产生向量数据的传感器主要包括 IMU、GNSS、超宽带 (ultra wide band, UWB) 测距等, 由于传感器器件误差、
解算累积误差、作业环境等方面的影响, 这些传感器对同一状态的感知精确性和可靠性存在差异, 仅依靠单一传
感器难以准确评估系统状态, 而通过向量数据融合对传感器误差进行互补校正, 能够有效提升无人机系统状态估
计的精度. 根据技术区别, 向量数据融合方法可以划分为基于滤波的方法和基于优化的方法.
2.1.1.1 基于滤波的方法
卡尔曼滤波 (Kalman filter, KF) [26] 是一种基于最小均方误差准则的最优估计方法, 可以从一系列含有不确定信
息的状态测量中对动态系统进行实时的状态估计, 是基于滤波方法的一大基石.
给定一个线性离散的动态系统, 其状态模型如公式 (1) 所示:
x k = A k x k−1 + B k u k + w k , w k ∼ N(0,Q k )
(1)
z k = H k x k +v k , v k ∼ N(0, R k )
其中, k 表示当前时刻, x 为系统状态向量, A 为状态转移矩阵; u 为系统控制向量, B 为控制转移矩阵, B k u k 表示 k
时刻系统控制信号对状态的影响, 无控制输入则该项为 0; z 为系统测量向量, Η 为测量转移矩阵; w 为过程噪声向
量, v 为测量噪声向量, 过程噪声和测量噪声互不相关且服从均值为 0 的高斯分布, 其协方差矩阵分别为 Q 和 R.
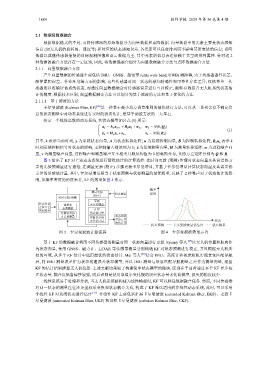
图 3 给出了 KF 对上述动态系统进行最优估计的计算流程: 在时间更新 (预测) 步骤对状态向量及其误差协方
差的先验预测量进行递推; 在测量更新 (校正) 步骤更新卡尔曼增益, 并基于卡尔曼增益计算状态向量及其误差协
方差的后验估计量. 其中, 卡尔曼增益相当于状态预测与状态测量的最优权重, 反映了 2 种噪声对于状态估计的影
响, 从概率密度的角度来看, KF 的效果如图 4 所示.
估计中选用最优的状态估计. Mei 等人
概率
测量更新 状态测量 密度
(校正)
时间更新(预测)
更新
状态和误 递推状 卡尔曼增益
差协方差 态预测量
的初始量 计算
计算误差协 状态估计量
方差预测量 更新误差协 状态和误
方差估计量 差协方差 状态
的估计量
状态预测 卡尔曼滤波最优估计 状态测量
图 3 卡尔曼滤波计算流程 图 4 卡尔曼滤波效果示意
基于 KF 的数据融合利用不同传感器的测量对同一状态向量进行更新. Spurny 等人 [27] 以无人机位置和航向作
为状态向量, 使用 GNSS、磁力计、LiDAR 等传感器测量分别构造 KF 对状态预测进行校正, 并且根据无人机所
处的环境, 从多个 KF [28] 结合 IMU、高度计和视觉相机实现景象匹配导航
后, 将 IMU 测量误差作为状态构建误差状态模型, 并以 IMU 测量与景象匹配导航测量之差作为测量向量, 根据
KF 的估计结果推算无人机位姿. 上述文献均采取了构建简单状态模型的做法, 区别在于前者通过多个 KF 异步校
正状态量, 耦合度低鲁棒性较强; 而后者则是使用取值小变化慢的误差状态量来化简模型, 损失的精度较少.
线性系统易于处理和分析, 当无人机系统被构建为线性模型时, KF 可以胜任数据融合任务. 然而, 不同传感器
对同一状态的测量往往涉及坐标系变换和状态耦合关系, 构成了 KF 难以适用的非线性动态系统, 此时, 可以采用
非线性 KF 对系统状态进行估计 [13] . 非线性 KF 主要包括扩展卡尔曼滤波 (extended Kalman filter, EKF)、无迹卡
尔曼滤波 (unscented Kalman filter, UKF) 和容积卡尔曼滤波 (cubature Kalman filter, CKF).