
Page 476 - 《软件学报》2025年第4期
P. 476
1882 软件学报 2025 年第 36 卷第 4 期
渐小型化、更加便携、更易部署、更为高效; 在以大疆为代表的科技公司推动下, 无人机产业实现了蓬勃发展, 无
人机的获取与应用门槛迅速降低. 无人机技术和产业的愈发成熟, 为无人机在环境监测、科考研究、损伤检测等 [3−5]
民用领域的广泛应用提供了良好基础, 无人机的身影在各行各业已是屡见不鲜, 无人机相关理论与应用已然成为
多领域多学科的研究焦点.
传感器的发展使得感知对象的感知数据类型和获取手段得到了极大扩展, 对于无人机而言, 其利用惯性测量
单元 (inertial measurement unit, IMU)、全球导航卫星系统 (global navigation satellite system, GNSS) 等部件, 感知机
体自身的位姿状态; 通过视觉相机、激光探测及测距系统 (light detection and ranging, LiDAR) 等功能组件, 获取目
标的观测数据. 产生多传感器数据是无人机平台的关键特性, 而如何对这些多源数据进行处理分析, 为决策人员提
供准确的无人机状态和目标信息, 成为无人机应用所面临的重要挑战 [6] . 数据融合是解决该问题的主要技术之一,
其对多源数据进行检测、关联、组合与估计的多层面处理, 从而获得准确的目标信息以支撑全面的态势评估. 数
据融合最早源于军事领域, 经过数十年的发展, 该技术取得了较好的研究成果, 在诸如自动驾驶、情感分析、身份
识别、医学诊断等 [7−10] 行业领域也得到了广泛的关注和应用.
无人机的多传感器数据融合已经具备了较为深厚的研究基础, 目前, 相关综述文献主要以某一应用方向为支
点, 或聚焦于无人机自身的定位导航 [11−13] , 或专注于无人机对目标的感知 [14−16] , 而缺少从无人机角度出发, 对多传
感器数据融合方法与应用进行全面整理的工作. 本文即对此展开综述总结, 划分传感器数据类型, 分类、阐述、比
较无人机多传感器数据融合方法, 对比分析各方法策略的优劣, 列举应用场景及其适用方法, 从而为研究人员了解
该领域技术的发展现状和应用范围提供详细参考.
本文第 1 节介绍无人机的系统组成. 第 2 节对无人机多传感器数据融合方法按照数据级、特征级和决策级的
分类进行归纳叙述, 并比较分析不同方法的特点. 第 3 节从定位导航、农业评估、环境监测和目标检测领域, 概述
无人机多传感器数据融合的应用现状. 最后, 第 4 节分析展望无人机多传感器数据融合的未来研究方向.
1 无人机系统组成
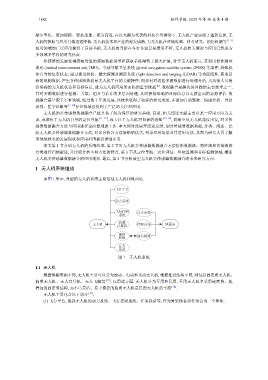
如图 1 所示, 典型的无人机系统主要包括无人机和地面站.
载荷
飞行平台
动力系统
飞行控制 显示系统
系统
机载
无人机 计算机 控制系统 地面站
通信 通信链路
链路
任务
图 1 无人机系统
1.1 无人机
根据供能来源不同, 无人机主要可以分为油动、电动和光动无人机, 根据推进结构不同, 则包括固定翼无人机、
旋翼无人机、无人直升机、无人飞艇等 [17] . 在用途方面, 无人机分为军用和民用, 军用无人机多采用速度快、航
程远的固定翼结构, 而小巧灵活、易于操控的旋翼无人机是民用无人机的主流 [18] .
无人机主要包含以下部分 [19] .
(1) 飞行平台, 搭载无人机的动力系统、飞行控制系统、任务载荷等, 作为骨架使各部件组合为一个整体.