
Page 23 - 《中国医疗器械杂志》2026年第2期
P. 23
Chinese Journal of Medical Instrumentation 2026年 第50卷 第2期
医 疗 机 器 人
1.2 硬件设计 动、使能状态、拖曳模式与自动模式的切换,主要
艾灸机器人选用FR5六自由度机械臂,其工作 功能包括艾灸穴位的识别、穴位信息记录、艾灸计
半径为922 mm,能够满足施灸工作要求。艾灸机 划设置、艾灸状态监测等。艾灸机器人系统软件控
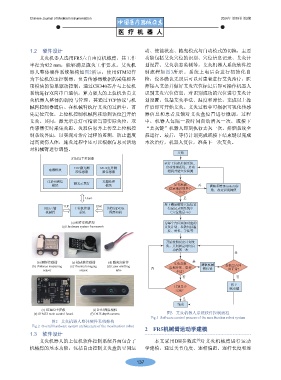
器人整体硬件系统架构如图2所示,使用STM32作 制流程如图3所示。系统上电后会进行初始化自
为下位机的主控制器,负责传感器数据的采集和各 检,设备确认无误后可以对患者进行艾灸治疗,医
项模块的简单驱动控制,通过CH340芯片与上位机 师接入艾条并做好艾灸穴位标记后即可操作机器人
系统进行双向串口通信。算力强大的上位机负责艾 识别艾灸穴位信息,对识别成功的穴位进行艾灸计
灸机器人整体的调度与管理,其通过TCP协议与机 划设置,包括艾灸手法、温度和时长,完成以上操
械臂控制器通信。在机械臂执行艾灸的过程中,首 作后即可开始艾灸。艾灸过程中可根据可视化传感
先定位穴位,上位机控制机械臂移动到该位置开始 器信息和患者反馈对艾灸盒位置进行微调。过程
艾灸。其间,激光示意灯可指示当前实际灸位,双 中,机器人每隔一段时间自动清灰一次,或按下
传感器实时采集灸距、灸温信息并上传至上位机控 “去灰键”机器人即刻执行去灰一次,排烟系统全
制系统界面,以实现对治疗过程的监测,防止温度 程运行。最后,等待计划完成或按下结束键以完成
过高烫伤人体,施灸过程中还可以根据信息灵活地 本次治疗,机器人复位,准备下一次艾灸。
对机械臂进行调整。
开始
STM32主控制器
运行上位机控制系统,
TOF激光测 MLX红外测 启动排烟系统,启动
电源模块
距传感器 温传感器 相机开始穴位检测
CH340通信 艾烟处理
模块 激光示意灯 模块 是否准确、 否 调整系统Threshold参
稳定地识别多个 数,改变识别阈值
穴位点?
Usart 是
按下确定键将穴位位置
TCP SDK
FR5六轴 上位机控制 英特尔D435i 信息记录到系统中
机械臂 系统 深度相机 (穴位数量<6)
(a) 硬件系统框架 为每个穴位添加对应的
(a) Hardware system framework 艾灸计划,参数包括温
度、时长、手法等
开始按照设定计划艾
灸。其间固定时间自
动清灰一次
是
(b) 测距传感器 (c) 热成像传感器 (d) 激光发射管 艾灸参数 是
(b) Distance measuring (c) Thermal imaging (d) Laser emitting 出现异常、患者 调整机械 参数是否回
sensor sensor tube 否 不适? 臂位置 归正常?
否 否
按下
计划是否
完成? 结束键
是
结束
(e) STM32主控板 (f) D435深度相机
(e) STM32 main control board (f) D435 depth camera 图3 艾灸机器人系统软件控制流程
Fig.3 Software control process of the moxibustion robot system
图2 艾灸机器人整体硬件系统架构
Fig.2 Overall hardware system architecture of the moxibustion robot
2 FR5机械臂运动学建模
1.3 软件设计
[8]
艾灸机器人的上位机软件控制系统界面包含了 本文采用DH参数法 对艾灸机械臂进行运动
机械臂的基本功能,包括自由控制艾灸盒的空间运 学建模,通过关节角度、连杆偏距、连杆长度和连
137