
Page 19 - 《中国医疗器械杂志》2026年第2期
P. 19
Chinese Journal of Medical Instrumentation 2026年 第50卷 第2期
医 疗 机 器 人
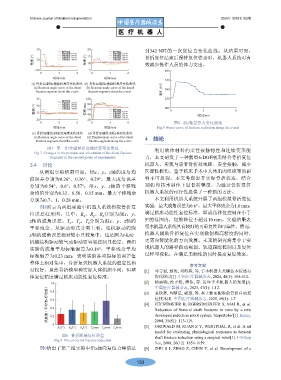
−50 20 到342 N时的一次复位力变化曲线。从结果可知,
期望角度 期望角度
实际角度−129 N 15 实际角度−129 N
实际角度−207 N
实际角度−207 N
角度/(°) −70 实际角度−271 N 角度/(°) 10 实际角度−271 N 骨折复位结束后保持复位姿态时,机器人系统可有
实际角度−342 N
实际角度−342 N
效减少操作人员的体力支出。
−90 5 400
0 3 6 0 3 6
时间/min 时间/min
350
(a) 骨折远端绕x轴旋转角度变化曲线 (b) 骨折远端绕y轴旋转角度变化曲线
(a) Rotation angle curve of the distal (b) Rotation angle curve of the distal 牵引力/N 300
fracture segment about the x-axis fracture segment about the y-axis
35 100 250
期望角度
实际角度−129 N 80
实际角度−207 N
角度/(°) 25 实际角度−271 N 位移/mm 60 期望角度 200 0 3 6
30
实际角度−342 N
实际角度−129 N
实际角度−207 N
40
实际角度−271 N
实际角度−342 N 时间/min
20 20
0 3 6 0 3 6 图9 沿x轴复位力变化曲线
时间/min 时间/min Fig.9 Force curve of fracture reduction along the x-axis
(c) 骨折远端绕z轴旋转角度变化曲线 (d) 骨折远端沿x轴位移变化曲线
(c) Rotation angle curve of the distal (d) Displacement curve of the distal 4 结论
fracture segment about the z-axis fracture segment along the x-axis
图7 第二组实验骨折远端位姿变化情况 利用软体材料的柔性接触特性和连续变形能
Fig.7 Changes in the position and orientation of the distal fracture
fragment in the second group of experiments 力,本文研发了一种新型6-DOF刚柔结合骨折复位
3.4 讨论 机器人,实现与患者骨折处柔顺、安全接触,减少
从两组实验结果可知,绕x、y、z轴的成角均 医源性损伤。鉴于临床手术中人体肌肉组织等的影
值误差分别为0.26°、0.36°、0.29°,最大成角误差 响不可忽视,本文考虑患者实际骨折状态,结合
分别为0.54°、0.6°、0.57°;沿x、y、z轴的平移残 3D打印技术制作下肢骨折模型,为验证骨折复位
余均值分别为0.32、0.58、0.15 mm,最大平移残余 机器人系统的可行性提供了一种新的方法。
分别为0.7、1、0.28 mm。 本文利用机器人系统开展了两组模拟骨折复位
图8所示为两组实验中机器人系统模拟骨折复 实验,最大成角误差为0.6°,最大平移残余为1.0 mm,
位误差柱形图,其中,R 、R 、R 分别为绕x、y、 满足临床功能性复位标准,即成角移位控制在小于
x
z
y
z轴的成角误差;T 、T 、T 分别为沿x、y、z轴的 5°的范围内,短缩移位不超过10 mm。实验结果表
x y z
平移残余。从驱动形式分类上看,电机驱动的绕 明本机器人系统具有较好的可重复性和可靠性。然而,
机器人辅助骨折复位在实现微创和高精度的同时,
x轴的成角误差相对较小且较集中,这是因为电动–
机械结构驱动较气动驱动更容易控制且稳定。两组 更需向智能化的方向发展。未来的研究将集中于实
实验的成角平均标准偏差为0.18°,平移残余平均 现机器人的路径自动规划、轨迹跟踪控制以及复位
标准偏差为0.23 mm,表明实验各项指标的误差值 过程可视化,在满足柔顺性的同时提高复位效率。
整体上相对集中,骨折复位机器人系统的稳定性相
参考文献
对较好。虽然骨折模型和实际人体组织不同,但整 [1] 马寻君, 蔚俊, 刘海涛, 等. 手术机器人关键技术综述与
体复位精度满足临床功能性复位标准。 优化探讨[J]. 中国医疗器械杂志, 2024, 48(5): 505-511.
1.0 [2] 杨丽晓, 侯正松, 唐伟, 等. 近年手术机器人的发展[J].
误差值(平均值±标准差) 0.6 [4] 位技术[J]. 中国医疗器械杂志, 2025, 49(1): 1-7.
中国医疗器械杂志, 2023, 47(1): 1-12.
0.8
袁钦辉, 刘梦星, 郭楚, 等. 基于断面配准的骨折自动复
[3]
FÜCHTMEIER B, EGERSDOERFER S, MAI R, et al.
0.4
Reduction of femoral shaft fractures in vitro by a new
0.2
2004, 35(S1): 113-119.
0 developed reduction robot system ‘RepoRobo’[J]. Injury,
R x /(°) R y /(°) R z /(°) T x /mm T y /mm T z /mm [5] OSZWALD M, RUAN Z Y, WESTPHAL R, et al. A rat
model for evaluating physiological responses to femoral
图8 骨折断端复位误差 shaft fracture reduction using a surgical robot[J]. J Orthop
Fig.8 The errors for fracture reduction
Res, 2008, 26(12): 1656-1659.
图9给出了第二组实验中沿x轴向复位力峰值达 [6] ZHU S J, ZHAO Z, CHEN Y, et al. Development of a
133