
Page 18 - 《中国医疗器械杂志》2026年第2期
P. 18
Chinese Journal of Medical Instrumentation 2026年 第50卷 第2期
医 疗 机 器 人
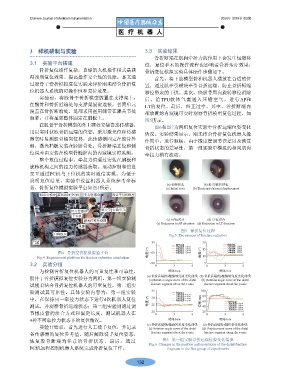
3 样机研制与实验 3.3 实验结果
骨折断端在肌肉牵拉力的作用下会发生短缩移
3.1 实验平台搭建 位,复位手术的操作流程也影响着骨折治疗效果,
骨折复位操作复杂,良好的人机操作模式是获 骨折复位模拟实验具体操作步骤如下。
得预期复位效果、提高操作安全性的保障。本文通 首先,将下肢模型骨和机器人摆放在合适的位
过股骨干骨折模拟复位实验来评价刚柔结合骨折复 置,通过肌牵引模块牵引骨折远端,防止骨折短缩
位机器人系统的可操作性和复位效果。 移位带来的干扰。其次,绕股骨周向旋转移位消除
实验前,将股骨干骨折模型放置在支撑架上, 后,给TPU软体气囊通入压缩空气,进行AP和
在髋骨和骨折近端处与支撑架固定连接,套筒单元 LT的复位。最后,纠正过牵。其中,骨折断端内
覆盖在骨折断端处,足部采用医用绷带在踝关节处
部放置的内窥镜可实时观察骨折模型复位过程,如
缠紧,并将足部整体固定在脚板上。
图5所示。
在股骨干骨折模型的外上踝处安装姿态传感器,
图6和图7为两组复位实验中骨折远端位姿变化
用以实时获取骨折远端的位姿;采用激光位移传感
情况。实验结果显示,刚柔结合骨折复位机器人操
器实时监测股骨轴向位移,此传感器固定在股骨外
作简单,运行顺畅。由于橡皮管调节误差以及恢复
侧,激光挡板安装在胫腓骨处;骨折断端正位和侧
骨折状态的差异性,第一组实验中模拟的相同肌肉
位误差由安装在模型骨髓腔内的内窥镜实时监测。
牵拉力稍有波动。
整个复位过程中,牵拉力值通过安装在脚板和
旋转机构之间的拉力传感器获取。运动控制和信息
交互通过PC机与下位机的实时通信实现。为便于
说明复位结果,实验中设置机器人系统参考坐标
(a) 初始状态 (b) 牵引/旋转移位
系,骨折复位模拟实验平台如图4所示。 (a) Initial state (b) Traction/rotational displacement
肌牵引模块 旋转机构 PC机 姿态传感器 股骨干骨折模型
z
y
x
拉力传感器 膝关节 套筒单元
下位机
激光位移传感器 (c) AP位对齐 (d) LT位对齐
(c) Reduction in AP direction (d) Reduction in LT direction
电源
图5 骨折复位过程
升降模块 Fig.5 The process of fracture reduction
气源 −30 20
期望角度 期望角度
实际角度−136 N 15 实际角度−136 N
实际角度−138 N
实际角度−138 N
图4 骨折复位模拟实验平台 角度/(°) −60 实际角度−129 N 角度/(°) 实际角度−129 N
实际角度−127 N
实际角度−127 N
Fig.4 Experimental platform for fracture reduction simulation 10
3.2 实验分组 −90 0 3 6 5 0 3 6
为检测骨折复位机器人的可重复性和可靠性, 时间/min 时间/min
股骨干骨折模拟复位实验分为两组。第一组实验测 (a) 骨折远端绕x轴旋转角度变化曲线 (b) 骨折远端绕y轴旋转角度变化曲线
(b) Rotation angle curve of the distal
(a) Rotation angle curve of the distal
试刚柔结合骨折复位机器人的可重复性,第二组实 fracture segment about the x-axis fracture segment about the y-axis
验测试其可靠性。具体实验内容为:第一组实验 35 期望角度 100
实际角度−136 N 80
中,在保持同一牵拉力状态下进行4次机器人复位 角度/(°) 30 实际角度−138 N 位移/mm 60 期望角度
实际角度−129 N
实际角度−127 N
实际角度−138 N
测试,并观察骨折远端状态;第二组实验则通过调 25 40 实际角度−136 N
实际角度−129 N
实际角度−127 N
节橡皮管的组合方式和固定长度,测试机器人在 20 0 3 6 20 0 3 6
4种不同牵拉力状态下的复位情况。 时间/min 时间/min
(c) 骨折远端绕z轴旋转角度变化曲线 (d) 骨折远端沿x轴位移变化曲线
实验开始前,首先进行人工徒手复位,并记录 (c) Rotation angle curve of the distal (d) Displacement curve of the distal
各传感器的复位参考值。随后解除徒手复位姿态, fracture segment about the z-axis fracture segment along the x-axis
恢复股骨断端为任意的骨折状态。最后,通过 图6 第一组实验骨折远端位姿变化情况
Fig.6 Changes in the position and orientation of the distal fracture
PC机远程控制机器人系统完成骨折复位工作。 fragment in the first group of experiments
132