
Page 111 - 《振动工程学报》2026年第3期
P. 111
第 3 期 潘 超,等: 惯容减震系统的速度最小化设计原理 711
表 4 不同方法所设计惯容减震结构的均方根响应
Tab. 4 Root-mean-square responses of structure with
inerter system designed by different methods
3
2ω 0 2ω 0
位移响应均方根 σ u 速度响应均方根 σ v
πS 0 πS 0
工况
本文 本文
定点法 比值 定点法 降低率
方法 方法
Ⅰ-1 7.141 7.071 1.010 7.137 7.060 1.08%
Ⅰ-2 4.509 4.472 1.008 4.492 4.428 1.42%
Ⅰ-3 3.804 3.780 1.006 3.777 3.708 1.84%
Ⅰ-4 3.171 3.162 1.003 3.129 3.042 2.78%
Ⅰ-5 2.568 2.582 0.994 2.507 2.372 5.35%
Ⅱ-1 7.145 7.071 1.011 7.159 7.077 1.15%
Ⅱ-2 4.526 4.472 1.012 4.577 4.493 1.82%
Ⅱ-3 3.833 3.780 1.014 3.913 3.813 2.55%
Ⅱ-4 3.223 3.162 1.019 3.347 3.215 3.94%
Ⅱ-5 2.670 2.582 1.034 2.858 2.665 6.77%
效黏滞阻尼结构位移响应均方根比如表 5 所示,表
中的数值均接近于 1,表明在固有阻尼比不为零的
情况下,按本文方法设计的惯容系统仍能提供预期
的阻尼比,即惯容系统参数设计公式也基本适用于
固有阻尼比不为零的情况。图 5 中惯容减震结构及
其对应的等效阻尼结构的位移时程响应曲线同样说
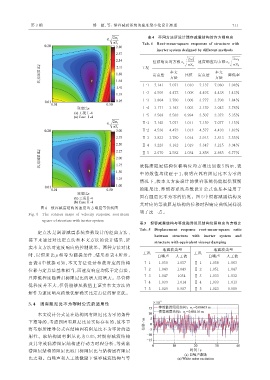
图 4 惯容减震结构的速度均方响应等值线图
明了这一点。
Fig. 4 The contour maps of velocity response root-mean-
square of structure with inerter system
表 5 惯容减震结构与等效黏滞阻尼结构位移响应均方根比
Tab. 5 Displacement response root-mean-square ratio
定点法是调谐减震系统参数设计的经典方法,
between structure with inerter system and
接下来通过对比定点法和本文方法的设计结果,证 structure with equivalent viscous damping
实本文方法对速度响应的控制效果。两种方法对比 地震波类型 地震波类型
工况 工况
时,以惯质比 μ 相等为前提条件,结果如表 4 所示。 白噪声 人工波 白噪声 人工波
由表 4 中数据可知,本文方法设计参数对应的结构 Ⅰ-1 1.058 1.057 Ⅱ-1 1.058 1.063
位移与定点法基本相当,而速度响应均低于定点法, Ⅰ-2 1.049 1.049 Ⅱ-2 1.051 1.047
且降低程度随着目标阻尼比的增大而增大。尽管降 Ⅰ-3 1.047 1034 Ⅱ-3 1.033 1.032
Ⅰ-4 1.039 1.014 Ⅱ-4 1.033 1.013
低程度并不大,但仍能够从数值上证实本文方法的
Ⅰ-5 1.029 0.987 Ⅱ-5 1.023 0.989
解作为速度响应的最优解确实比定点法的解更优。
3. 4 固有阻尼比不为零时公式的适用性
本文设计公式是在结构固有阻尼比为零的条件
下推导的,考虑到固有阻尼比是实际存在的,故本节
将考察所推导公式在结构固有阻尼比不为零时的适
用性。取结构固有阻尼比为 0.05,对惯容减震结构
及其等效黏滞阻尼结构进行动力时程分析,等效黏
滞阻尼结构的阻尼比取目标阻尼比与结构固有阻尼
比之和。白噪声和人工波激励下惯容减震结构与等