
Page 110 - 《振动工程学报》2026年第3期
P. 110
710 振 动 工 程 学 报 第 39 卷
3. 2 性能验证
为验证各工况设计参数能否实现预期的目标阻
尼比,求解惯容减震结构及其对应等效黏滞阻尼结
构(其固有阻尼比等于目标阻尼比)在地震激励下的
动 力 时 程 响 应 ,并 计 算 两 类 结 构 的 位 移 响 应 均 方
根比:
1 n 1 n
2
2
= ∑ u 1 ( t i ) ∑ u 2 ( t i ) (38)
n n
R σ u
i = 1 i = 1
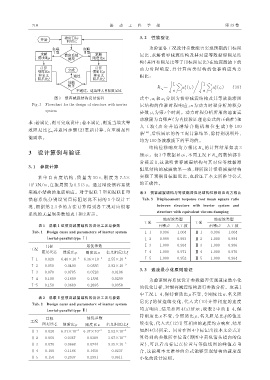
图 3 惯容减震结构设计流程 式中, u 1 和 u 2 分别为惯容减震结构及其等效黏滞阻
Fig. 3 Flowchart for the design of structure with inerter 尼结构的位移时程响应; n 为动力时程分析的积分
system 步数; t i 为第 i 个时刻。动力时程分析所用的地面运
动激励为白噪声(为直接验证理论公式的正确性)和
求:若满足,则可完成设计;若不满足,则适当增大等
人 工 波(由 金 井 清 谱 结 合 随 机 相 位 生 成)各 100
效阻尼比 ζ eq 并返回步骤(2)重新计算,直至满足性
条 [16] ,后续展示的各工况计算结果,除特别说明外,
能需求。
均为 100 条波激励下的平均值。
的计算结果如表 3
结构位移响应均方根比 R σ u
3 设计算例与验证
所示。表 3 中数据显示,不同工况下 R σ u 的数值都非
常接近 1,这说明惯容减震结构与其对应等效黏滞
3. 1 参数计算
阻尼结构的减震效果一致,即所设计惯容减震结构
实现了预期目标阻尼比,也验证了本文所推导公式
某 单 自 由 度 结 构 ,质 量 为 50 t,刚 度 为 7.5×
3
10 kN/m,自振周期为 0.513 s。通过增设惯容系统 的正确性。
来减小结构的地震响应。对于混联Ⅰ型和混联Ⅱ型 表 3 惯容减震结构与等效黏滞阻尼结构位移响应均方根比
惯容系统分别设置目标阻尼比不同的 5 个设计工 Tab. 3 Displacement response root-mean-square ratio
况,根据第 2.3 节的方法计算得到各工况对应惯容 between structure with inerter system and
structure with equivalent viscous damping
系统的无量纲参数如表 1 和 2 所示。
地震波类型 地震波类型
工况 工况
表 1 混联Ⅰ型惯容减震结构的设计工况与参数 白噪声 人工波 白噪声 人工波
Tab. 1 Design cases and parameters of inerter system Ⅰ-1 0.996 1.004 Ⅱ-1 0.996 1.004
(serial-parallel type Ⅰ) Ⅰ-2 0.999 0.993 Ⅱ-2 1.000 0.994
目标 最优参数 Ⅰ-3 1.000 0.984 Ⅱ-3 1.000 0.986
工况
阻尼比 ζ t 惯质比 μ 刚度比 κ 名义阻尼比 ξ Ⅰ-4 1.000 0.971 Ⅱ-4 1.000 0.976
Ⅰ-1 0.020 6.40×10 −3 6.36×10 −3 2.55×10 −4 Ⅰ-5 1.000 0.952 Ⅱ-5 1.000 0.964
−3
Ⅰ-2 0.050 0.0400 0.0385 3.92×10
3. 3 速度最小化原则验证
Ⅰ-3 0.070 0.0785 0.0728 0.0106
Ⅰ-4 0.100 0.1609 0.1386 0.0299 为验证惯容系统设计参数能否实现速度最小化
Ⅰ-5 0.150 0.3689 0.2695 0.0958
的优化目标,对惯容减震结构进行参数分析。取表 1
中工况Ⅰ⁃4,保持惯质比 μ 不变,令刚度比 κ、名义阻
表 2 混联Ⅱ型惯容减震结构的设计工况与参数
Tab. 2 Design cases and parameters of inerter system 尼比 ξ 的值连续变化,代入式(10)计算相应的速度
(serial-parallel type Ⅱ) 均方响应,结果如图 4(a)所示;取表 2 中的Ⅱ⁃4,保
持刚度比 κ 不变,令惯质比 μ、名义阻尼比 ξ 的值连
目标 最优参数
工况 续变化,代入式(12)计算相应的速度均方响应,结果
阻尼比 ζ t 惯质比 μ 刚度比 κ 名义阻尼比 ξ
Ⅱ-1 0.020 6.31×10 −3 6.37×10 −3 2.52×10 −4 如图 4(b)所示。同时在图 4 中标记出按本文公式计
−3 算得到的参数所在位置(即图中黄色箭头指向的位
Ⅱ-2 0.050 0.0367 0.0389 3.67×10
Ⅱ-3 0.070 0.0668 0.0744 9.35×10 −3 置),可以看出标记点位置与等值线图的峰值点重
Ⅱ-4 0.100 0.1186 0.1450 0.0237 合,这说明本文推导的公式能够实现结构的速度最
Ⅱ-5 0.150 0.2037 0.2991 0.0611 小化的设计原则。