
Page 112 - 《振动工程学报》2026年第3期
P. 112
712 振 动 工 程 学 报 第 39 卷
4. 2 算例及设计参数
算例选用日本隔震协会提出的 10 层基准结构
模型 [23] ,其固有阻尼比为 0.02。模型及其详细信息
如图 6 和表 6 所示。
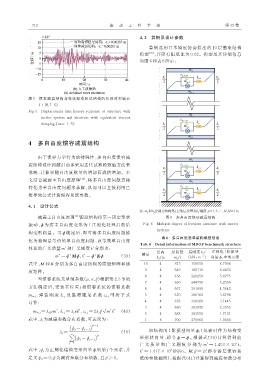
图 5 惯容减震结构与等效黏滞阻尼结构的位移时程响应
(工况Ⅰ-5)
Fig 5 Displacement time-history response of structure with
inerter system and structure with equivalent viscous
damping (case Ⅰ-5)
4 多自由度惯容减震结构
由于惯容力学行为的特殊性,多自由度惯容减
震结构设计问题目前多采用迭代试算的数值方法来
求解,计算量随自由度数量的增加而成倍增加。本
文结合减震主自由度原理 [22] ,将多自由度问题直接
转化为单自由度问题来求解,从而可以直接利用已
推导的公式计算惯容系统参数。
4. 1 设计公式
注: m j 和 k j 分别为结构第 j层的层质量和层刚度, j=1,2,…,N,N=10。
减震主自由度原理 [22] 假设结构按某一固定形状 图 6 多自由度惯容减震结构
振动, ϕ 为按主自由度变形为 1 正则化处理后的结 Fig. 6 Multiple-degree-of-freedom structure with inerter
systems
构变形向量。当 ϕ 确定后,即可将多自由度问题转
表 6 多自由度基准结构模型信息
化为物理量等价的单自由度问题,该等效单自由度
Tab. 6 Detail information of MDOF benchmark structure
体系的广义质量 m 和广义刚度 k 分别为:
*
*
层高 层质量 层刚度 k j / 正则化 1 阶振型
m = ϕ Μϕ,k = ϕ Κϕ (39) 楼层 h j /m m j /t ( kN ⋅ m -1 ) 向量 ϕ 1 中的元素
T
T
*
*
式中, M 和 K 分别为多自由度结构的质量矩阵和刚 10 4 875 158550 6.7906
度矩阵。 9 4 649 180110 6.4250
8 4 656 220250 5.8775
当惯容系统无量纲参数(μ、κ、ξ)根据第 2.3 节的
7 4 660 244790 5.2590
方法确定后,安装在位置 j 处惯容系统的惯容系数 6 4 667 291890 4.5642
m in,j、弹 簧 刚 度 k t,j 及 黏 滞 阻 尼 系 数 c d,j 可 按 下 式 5 4 670 306160 3.8798
计算: 4 4 676 328260 3.1445
3 4 680 383020 2.3955
m in,j = λ j μm ,k t,j = λ j κk ,c d,j = 2λ j ξ m k * (40)
*
*
*
2 4 682 383550 1.7121
式中, λ j 为减震参数分布系数,可表示为: 1 6 700 279960 1.0000
) β - 2
( ϕ j - ϕ j - 1 取结构的 1 阶振型向量 ϕ 1 (见表 6)作为结构变
λ j = (41)
n ) β
∑( ϕ j - ϕ j - 1 形形状向量,即令 ϕ = ϕ 1,根据式(39)计算得到前
j = 1 * 5
广 义 质 量 和 广 义 刚 度 分 别 为 m = 1.453 × 10 t,
式中, ϕ j 为正则化结构变形向量 ϕ 的第 j 个元素,并 k = 1.417 × 10 kN m。取 β = 2 (即令各层惯容系
*
6
定义 ϕ 0 = 0; β 为减震参数分布指数,且 β ≥ 0。 统的参数相同),根据式(41)计算得到减震参数分布