
Page 316 - 《振动工程学报》2025年第11期
P. 316
2774 振 动 工 程 学 报 第 38 卷
式中,m 0 为车身质量;F h 为最底层货物-车身耦合作 大型厢式货车,货物均匀分布于货厢内,货物通过包
1
用力;F c 为驾驶室-车身耦合作用力;F sj (j=1, 2, 3, 4) 装与车身接触。利用分布刚度与分布阻尼描述货物
为悬架-车身耦合作用力;J p 和 0 J r 分别为车身绕 y 轴 包装的垂向力学特性,搭建考虑驾驶室的车辆垂向
0
和 x 轴的转动惯量;L 1 和 L 2 分别为前、后车轮与俯 动力学模型,该模型参数对标试验车辆参数,具体可
仰轴的距离;L 3 和 L 4 分别为左、右车轮与侧倾轴的 见文献 [12]。将基于 C 级路面激励条件计算得到的
距离。 单层货物-车身耦合模型车身垂向 PSD 仿真结果与
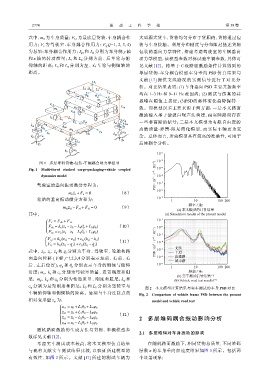
文献 [17] 提供支线路况的实测信号进行了对比分
z i
析。对比结果表明:(1) 车身垂向 PSD 主要共振频率
L 9
O hi
L 7
均在 1~3 Hz 和 9~11 Hz 范围内;(2) 测试与仿真的共
L 8
φ pi
x i θ pi
y i
... m i 振峰在幅值上接近;(3)PSD的整体变化趋势保持一
...
z c ...
n层
c hi L 10 致。而模型误差主要来源于两方面:一是本文路面
m c ... ...
k hi
z 0
激励输入基于滤波白噪声法构建,而实际路面存在
c c
k c
L 6 L 5
c s4
O b θ p0 L 2 k s4 一些非高斯的信号;二是本文模型为有限自由度的
L 4 z t4
c s2
k s2
φ p0 m t4
z t2 离散质量-弹簧-阻尼简化模型,而实际车辆更为复
m t2 m 0
L 3
L 1 y 0
c t4
x 0
q 3
k t4
c t2 杂。总体而言,所建模型具有较高的准确性,可用于
k t2
c s1
k s1 q 4
z t1
q 2 m t1 后续耦合分析。
c t1
k t1 −1
10
10 −2
图 1 多层堆码货物-包装-车辆耦合动力学模型
Fig. 1 Multi-tiered stacked cargo-packaging-vehicle coupled 10 −3
dynamics model PSD / (m 2 ·s −4 ·Hz −1 ) 10 −4
驾驶室的垂向振动微分方程为: 10 −5
m c ¨z c + F c = 0 (8) 10 −6
轮胎的垂向振动微分方程为: 10 −7 1 10 100 200
m tj ¨z tj − F s j + F tj = 0 (9) 频率 / Hz
(a) 本文模型的计算结果
其中, (a) Simulation results of the present model
10 −1
F c = F ck + F cc
(10)
F ck = k c (z c −z 0 − L 6 θ p + L 5 φ p ) 10 −2
F cc = c c (˙z c − ˙z 0 − L 6 θ p + L 5 ˙φ p ) −3
˙
{ 10
F s j = k s j (z s j −z tj )+c s j (˙z s j − ˙z tj )
(11) PSD / (m 2 ·s −4 ·Hz −1 ) 10 −4
F tj = k tj (z tj −q j )+c tj (˙z tj − ˙q j )
式中, z 0 、z c 、z t 和 j q j 分别为车身、驾驶室、轮胎和路 10 −5 支线
干道
面垂向位移 (下标 j=1,2,3,4 分别表示左前、右前、右 10 −6 高速路
城市路
后、左后位置);φ p 和 θ p 分别表示车身的侧倾与俯仰 10 −7
1 10 100 200
角度;m c 、k c 和 c c 分别为驾驶室质量、悬置刚度和阻 频率 / Hz
(b) 实车测试信号结果 [17]
尼; m tj 、k t 和 j c t 分别为轮胎质量、刚度和阻尼;k s 和 (b) Vehicle road test results [17]
j
j
c s 分别为悬架刚度和阻尼;L 5 和 L 6 分别为驾驶室与
j
图 2 本文模型计算结果与实车测试的车身 PSD 对比
车辆俯仰轴和侧倾轴的距离。悬架与车身连接点的
Fig. 2 Comparison of vehicle frame PSD between the present
相对变形量 z s 为: model and vehicle road test
j
z s1 = z 0 + L 1 θ 0 + L 3 φ 0
z s2 = z 0 + L 1 θ 0 − L 4 φ 0 (12)
z s3 = z 0 − L 2 θ 0 − L 4 φ 0 2 多 层 堆 码 耦 合 振 动 影 响 分 析
z s4 = z 0 − L 2 θ 0 + L 3 φ 0
随机路面激励的生成方法与货物、车辆模型参
2.1 多层堆码对车身振动的影响
数详见文献 [12]。
考虑实车测试成本较高,将本文模型仿真结果 在随机路面激励下,相同货物总质量,不同堆码
与现有文献实车测试结果比较,以验证所建模型的 层数 n 的车身垂向加速度结果如图 3 所示。包括两
有效性,如图 2 所示。文献 [17] 所述的测试车辆为 个显著现象: