
Page 146 - 《振动工程学报》2025年第11期
P. 146
2604 振 动 工 程 学 报 第 38 卷
Tikhonov
正则化 L曲线法获得正则化参数λ
−1
2
R
T
T
T
求解q k (B k B k +λ I) B k U k+1 Y
连续系统
模态截断/模态坐标变换 混合LSQR算法计算载荷:
R R T −1 T T
2
F k V k q k V k (B k B k λ I) B k U k+1 Y
模态空间下的离散系统
R R
计算响应:Y k =HF k
R
ΔY=Y−Y k
显式Newmark-β法确定
载荷和响应的卷积关系:
评估计算
R
m
Y=HF,令k=1 ΔY =Y−H(F k +μΔF k )=
响应和测 ΔY−μU k+1 B k B k U k+1 ΔY
R
T
量响应之
间的误差,
动态控制
基于H的Lanczos双对角 正则化强度 (U k+1 B k B k U k+1 ΔY) ΔY
R
T
T
μ=
化获得矩阵:B k , U k+1 , V k R T 2
U k+1 B k B k U k+1 ΔY
LSQR算法得计算载荷: F k M =V k (q k μB k U k+1 ΔY)
R
T
R
+ + T
F k =V k q k =||Y||V k B k e 1 =V k B k U k+1 Y
LSQR算法
否
M M M <ε
F k+1 −F k / F k
k=k+1
是
识别载荷F OPT
混合LSQR修正算法
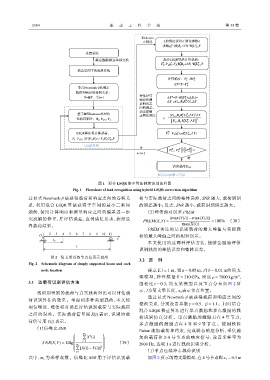
图 1 混合 LSQR 修正算法载荷识别流程图
Fig. 1 Flowchart of load recognition using hybrid LSQR correction algorithm
过显式 Newmark-β 法获得载荷和响应之间的卷积关 荷与实际载荷之间的整体误差,SNR 越大,载荷识别
系,利用混合 LSQR 算法获得子空间的最小二乘问 的误差越小;反之,SNR 越小,载荷识别误差越大。
题解,使用计算响应和测量响应之间的偏差进一步 (2)峰值相对误差 PREM
完成解的修正,并评估误差,直到满足要求,获得最 |max(Y(i))−max(X(i))|
PREM(X,Y) = ×100% (30)
终载荷结果。 max(X(i))
PREM 关注的是识别载荷的最大峰值与实际载
1 2 3 4 5 6 7 8 9 10 11
O 荷的最大峰值之间的相对误差。
x
x a
本文使用的这两种评估方法,能够全面地评估
l
识别载荷的峰值误差和整体误差。
图 2 简支梁及各节点位置示意图
3.2 算 例
Fig. 2 Schematic diagram of simply supported beam and each
node location 建立长 l = 1 m,宽 a = 0.05 m,高 b = 0.01 m的简支
3
梁 模 型, 弹 性 模 量 E = 210 GPa, 密 度 ρ = 7800 kg/m ,
3.1 动载荷识别评估方法 泊松比 ν = 0.3,简支梁模型以及节点分布如图 2 所
示, l为简支梁长度, x a 表示节点位置。
将识别得到的载荷与真实载荷对比可以评估载
通过显式 Newmark-β 法获得载荷和响应之间的
荷识别算法的效果。考虑到多种类型载荷,本文使
卷积关系,分别设置参数 γ = 0.5、β = 1.1。同时结合
用信噪比、峰值相对误差评估识别载荷与实际载荷
混合 LSQR 修正算法进行单点激励和多点激励的载
之间的误差。实际载荷信号用 X(i) 表示,识别的载
荷识别仿真分析。单点激励的激励点在 4 号节点,
荷信号用 Y(i) 表示。
多 点 激 励 的 激 励 点在 4 号 和 9 号 节 点 。 使 用 软 件
(1)信噪比 SNR
Patran 施加载荷和约束,完成瞬态响应分析,采集施
m c ∑
2 加的载荷和 号节点的响应信号,设置采样率为
X (i) 2~8
i=1
(29)
S NR(X,Y) = 10lg 2000 Hz,选取 1 s 进行载荷识别分析。
m c ∑
2
[X(i)−Y(i)] (1)单点连续冲击载荷识别
i=1
式中,m c 为采样点数。信噪比 SNR 用于评估识别载 如图 2 所示的简支梁模型,在 4 号节点即 x 1 = 0.3 m