
Page 163 - 《振动工程学报》2025年第8期
P. 163
第 8 期 周智辉,等: 风与轨道不平顺随机激励下车辆-轨道系统耦合振动的概率密度演化分析 1803
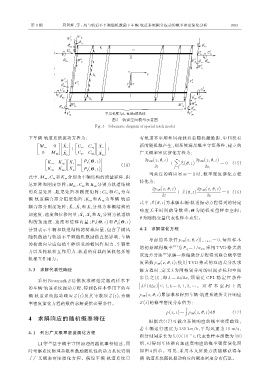
图 3 轨道空间模型示意图
Fig. 3 Schematic diagram of spacial track model
下车辆‑轨道系统振动方程为: 有轨道不平顺和风荷载双重随机激励源,中间没有
é ̇
ê ê 0 ú ú ê ê ̈ ù ú ú ú ú + êê ê ê éC vv C vg ú ú ú ú ù ê ê X v ù ú ú ú ú + 新的随机源产生,则系统满足概率守恒条件,建立的
ú ú
éM vv
ê ê
ù éX v
ê ê
ê ê
ë 0 M gg û ëX g û ëC gv C gg ëX g û 广义概率密度演化方程为:
û
̇
̈
m
ê ê
ê
ê ê ê ê éK vv K vg ú ú êê ê ê ù ú ú ú ú = ê éP v( Θ,t ù ) ú ú ú ú (14) ∂p ZΘ( z,θ,t ) + ∑ Z i(θ,t) ∂p ZΘ( z,θ,t ) = 0 (15)
̇
ú ú
ù éX v
∂t
ê ê
ëK vg K gg û ëX g û ë P g( Θ,t ) û i = 1 ∂z i
当关注的响应量 m = 1 时,概率密度演化方程
式中, M vv、 C vv 和 K vv 分别为车辆结构的质量矩阵、阻
转化为:
尼矩阵和刚度矩阵; M gg 、 C gg 和 K gg 分别为轨道结构
∂p ZΘ( z,θ,t ) ∂p ZΘ( z,θ,t )
的质量矩阵、阻尼矩阵和刚度矩阵; C gv 和 C vg 为车 + Z (θ,t) = 0 (16)
̇
∂t ∂z
辆‑轨道耦合部分阻尼矩阵; K gv 和 K vg 为车辆‑轨道
̇
式中,Z (θ,t) 为求解车辆‑轨道振动方程得到的特定
̇
耦合部分刚度矩阵;X v、X v 和 X v 分别为车辆结构的
̈
响应关于时间的导数项; Θ 为随机变量样本空间;
̇
̈
加速度、速度和位移向量;X g、X g 和 X g 分别为轨道结 θ 为随机变量代表性样本点集。
构的加速度、速度和位移向量; P v( Θ,t) 和 P g( Θ,t)
分别表示车辆和轨道结构的荷载向量,包含了横风 4. 2 求解演化方程
随机激励与轨道不平顺随机激励的直接影响,车辆
考虑边界条件 p ZΘ( z,θ,t)| z → ±∞ = 0,每组样本
的荷载向量应包括车体所受的横风作用力、车辆重
的初始赋得概率 [21] 为 P q = 1/n sel,采用 TVD 格式的
力以及轮轨相互作用力,轨道的荷载向量仅包括轮
双边差分法 [20] 求解一维偏微分方程得到联合概率密
轨相互作用力。
度函数 p ZΘ( z,θ,t);使用 TVD 格式的双边差分法求
3. 3 求解代表性响应 解方程时,定义 λ 为网格划分时的时间步长和空间
步 长 之 比 ,即 λ = Δt Δz,须 满 足 CFL 稳 定 性 条 件
采用 Newmark‑β 法依次求解给定随机样本下
| λZ ( kΔt )| ≤ 1,k = 0,1,2,⋯。 对 样 本 空 间 上 的
̇
的车辆‑轨道系统振动方程,得到各样本作用下的车
̇
辆‑轨道系统振动响应 Z (t) 及其导数项 Z (t),为概 p ZΘ( z,θ,t) 累加求和得到车辆‑轨道系统所关注响应
率密度演化方程的数值求解提供必要条件。 Z (t) 的概率密度分布值为:
p( z,t) = ∫ p ZΘ( z,θ,t) dθ (17)
4 求解响应的随机概率特征
根据式(17)可做出系统响应的概率密度曲线,
若车辆运行速度为 250 km/h,平均风速为 10 m/s,
4. 1 列出广义概率密度演化方程
−5
积分时间步长为 5.0✕10 s,代表性样本组数为 300
LI 等 [20] 基于概率守恒原理的随机事件描述,同 组,可得到车体横向加速度响应的概率密度演化图
时考察系统物理参数和激励随机性的动力系统得到 如图 4 所示。可见,采用本文所提方法能够获得车
了广义概率密度演化方程。假设车辆‑轨道系统只 辆‑轨道系统随机振动响应的概率密度分布信息。