
Page 162 - 《振动工程学报》2025年第8期
P. 162
1802 振 动 工 程 学 报 第 38 卷
st 2 wind st d
ï ï ï ï ï ï = F y + F y
ì F y
ì F y = 0.5ρAU R C y
ï ï
st
st
2
í F z = 0.5ρAU R C z (10) íF z wind = F z + F z d (13)
ï ï st 2 ï ï wind = M x + M x d
ï ï
st
î î M x
ï ïM x = 0.5ρAHU R C mx
d ˉ
ï ï
ìF y = ρAU ( ) z v h( ) t C y
ï ï 3 求解车辆⁃轨道系统的代表性响应
ˉ
d
í F z = ρAU ( ) z v h( ) t C z (11)
ï ï
î d ˉ 3. 1 车辆⁃轨道模型
ï ïM x = ρAHU ( ) z v h( ) t C mx
式中, ρ 为空气密度,取为 1.225 kg/m ; A 为车体受
3
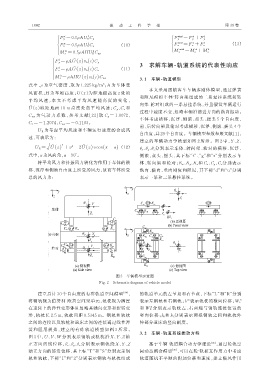
本文采用四轴客车车辆多刚体模型,通过弹簧
ˉ
风面积; H 为车厢高度;U ( z ) 为距地面高度 z 处的
和阻尼模拟车体‑转向架组成的二系悬挂系统和转
平 均 风 速 ,本 文 不 考 虑 平 均 风 速 随 高 度 的 变 化 ,
向架‑轮对组成的一系悬挂系统,并且假设车辆运行
ˉ
U ( z ) 取 距 地 面 10 m 高 度 处 的 平 均 风 速 ; C y、 C z 和
过程中速度不变,忽略车辆沿前进方向的纵向振动。
C mx 为 气 动 力 系 数 ,参 考 文 献[23]取 C y = 1.0072,
车体考虑横移、沉浮、侧滚、点头、摇头 5 个自由度,
C z =-1.2074, C mx =-0.1103。
前、后转向架及轮对考虑横移、沉浮、侧滚、摇头 4 个
U R 为考虑平均风速和车辆运行速度的合成风
自由度,共 29个自由度。车辆模型参数参照文献[1],
速,可表示为:
建立的车辆动力学模型如图 2 所示。图 2 中,Y、Z、
)
ˉ
ˉ
2
U R = U ( ) z 2 + v - 2U ( ) z v cos( π - α (12) θ x 、θ y 、θ z 分别表示车体、转问架、轮对的横移、沉浮、
式中,α 为风向角,α=90°。 侧滚、点头、摇头,其下标“t”、“g”和“s”分别表示车
将平均风力和抖振风力转化为作用于车体的横 体、转向架和轮对;K x 、K y 、K z 和 C x 、C y 、C z 分别表示
移、沉浮和侧滚自由度上所受的风力,故而车体所受 纵向、横向、垂向刚度和阻尼,其下标“d”和“u”分别
总的风力为: 表示一系和二系悬挂系统。
图 2 车辆模型示意图
Fig. 2 Schematic diagram of vehicle model
建立总计 30 个自由度的有砟轨道空间模型 [24] , 的轨道单元的左节点和右节点,下标“L”和“R”分别
将钢轨视为伯努利‑欧拉空间梁单元,轨枕视为搁置 表示左钢轨和右钢轨;V 表示轨枕的横向位移; W L S
S
在道床上的弹性变形体且忽略其轴向变形和扭转变 和 W R 分别表示轨枕左、右两端与钢轨连接位置的
S
形,轨枕长 2.5 m,轨枕间距 0.5345 m。钢轨和轨枕 竖向位移;k 0 和 k 1 分别表示两根钢轨之间和轨枕外
之间的连接以及轨枕和道床之间的连接通过线性弹 伸部分道床的竖向刚度。
簧和阻尼模拟,建立的有砟轨道模型如图 3 所示。
3. 2 车辆⁃轨道系统振动方程
图 3 中,U、V、W 分别表示钢轨或轨枕沿 X、Y、Z 轴
正方向的线位移,θ x 、θ y 、θ z 分别表示钢轨绕 X、Y、Z 基于车辆‑轨道耦合动力学理论 [25] ,通过轮轨空
轴正方向的转角位移,其上标“T”和“S”分别表示钢 间动态耦合模型 [26] ,可以在轮‑轨相互作用力中考虑
轨和轨枕,下标“1”和“2”分别表示钢轨与轨枕组成 轨道随机不平顺的附加位移和速度,建立横风作用