
Page 103 - 卫星导航2021年第1-2合期
P. 103
Shinghal and Bisnath Satell Navig (2021) 2:10 Page 6 of 17
Table 2 Mean C/N and RMS pseudorange multipath for L1/E1 and L5/E5a frequencies for Xiaomi MI 8 in diferent multipath scenarios
0
Diferent multipath scenarios Mean C/N for diferent frequency RMS for diferent frequency
0
Mean L1/E1 C/N (dB·Hz) Mean L5/E5a C/N (dB·Hz) RMS L1/E1 code multipath RMS L5/E5a
0
0
(m) code multipath
(m)
Low multipath 35.9 34.9 6.4 8.2
Medium multipath 35.5 33.2 10.2 16.1
High multipath 29.0 26.5 14.8 19.5
than that of the efect on the SwiftNav Piksi in a static
environment and 83% higher in the kinematic environ-
ment. Since the smartphone antenna senses refected sig-
nals from all directions, the multipath is related to the C/
N rather than the elevation angle as observed in Fig. 4.
0
Two satellites, G25 and E07, were observed to under-
stand the variation in multipath with a change in C/
N and elevation angle since they were tracked for the
0
entire duration of the data collection and the infer-
ences that can be drawn are:
(1) Te elevation angle does not infuence C/N values
0
and multipath for smartphones as shown in Fig. 4a.
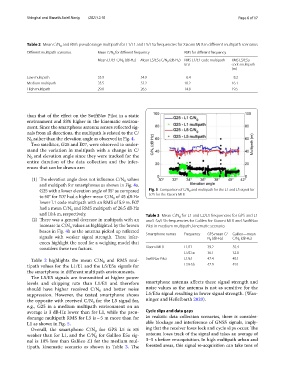
G25 with a lower elevation angle of 35° as compared Fig. 5 Comparison of C/N and multipath for the L1 and L5 signal for
0
to 60° for E07 had a higher mean C/N of 45 dB·Hz G25 for the Xiaomi MI 8
0
lower L1 code multipath with an RMS of 5.9 m. E07
had a mean C/N and RMS multipath of 26.5 dB·Hz
0
and 10.4 m, respectively. Table 3 Mean C/N for L1 and L2/L5 frequencies for GPS and E1
0
(2) Tere was a general decrease in multipath with an and E5a/E5b frequencies for Galileo for Xiaomi MI 8 and SwiftNav
increase in C/N values as highlighted by the brown Piksi in medium multipath, kinematic scenario
0
boxes in Fig. 4b as the antenna picked up refected
signals with weaker signal strength. Tese infer- Smartphone names Frequency GPS-mean C/ Galileo—mean
N (dB·Hz)
C/N (dB·Hz)
0
0
ences highlight the need for a weighing model that
considers these two factors. Xiaomi MI 8 L1/E1 39.2 35.4
L5/E5a 36.1 32.0
Table 2 highlights the mean C/N and RMS mul- SwiftNav Piksi L1/E1 47.4 48.1
0
tipath values for the L1/E1 and the L5/E5a signals for L2/E5b 47.9 49.1
the smartphone in different multipath environments.
The L5/E5 signals are transmitted at higher power
levels and chipping rate than L1/E1 and therefore smartphone antenna affects these signal strength and
should have higher received C/N and better noise noise values as the antenna is not as sensitive for the
0
suppression. However, the tested smartphone shows L5/E5a signal resulting in lower signal strength. (Wan-
the opposite with received C/N for the L5 signal for, ninger and Heßelbarth 2020).
0
e.g., G25 in a medium multipath environment on an
average is 3 dB·Hz lower than for L1, while the pseu- Cycle slips and data gaps
dorange multipath RMS for L5 is ~ 5 m more than for In realistic data collection scenarios, there is consider-
L1 as shown in Fig. 5. able blockage and interference of GNSS signals, imply-
Overall, the smartphone C/N for GPS L5 is 8% ing that the receiver loses lock and cycle slips occur. Te
0
weaker than for L1, and the C/N for Galileo E5a sig- antenna loses track of the signal and takes an average of
0
nal is 10% less than Galileo E1 for the medium mul- 3–5 s before re-acquisition. In high multipath urban and
tipath, kinematic scenario as shown in Table 3. The forested areas, this signal re-acquisition can take tens of