
Page 29 - 《真空与低温》2026年第2期
P. 29
148 真空与低温 第 32 卷 第 2 期
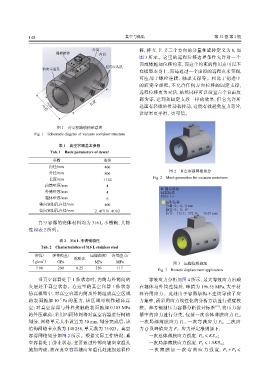
外筒 移,将 X、Y、Z 三个方向的分量和旋转定义为 0,如
阀箱箱体 内筒
图 3 所示。这里的远程位移边界条件允许对一个
面或体施加位移约束,而这个约束的作用点可以不
径向室温孔
轴向室温孔
在模型本身上,而是通过一个虚拟的远程点来实现,
可应用于螺栓连接、轴承支撑等。相比于把选中
的面完全焊死,不允许任何方向位移的固定支撑,
远程位移更为灵活,虽然同样可以设置六个自由度
都为零,达到和固定支撑一样的效果,但它允许所
长度
选面有轻微的滑动和转动,这能有效避免应力奇异,
内径
外径
让结果更平滑、更可信。
图 1 真空容器结构示意图
Fig. 1 Schematic diagram of vacuum container structure
表 1 真空容器基本参数
Tab. 1 Basic parameters of dewar
参数 取值
内径/mm 400
图 2 真空容器网格划分
外径/mm 800
Fig. 2 Mesh generation for vacuum containers
长度/mm 1 162
内筒壁厚/mm 4
B: 静态结构
外筒壁厚/mm 4 远程位移
时间: 1 s
箱体壁厚/mm 6
远程位移
轴向室温孔直径/mm 400 分量: 0,0,0 mm
径向室温孔直径/mm 2−Φ71/1−Φ102 旋转: 0,0,0°
位置: −115.7,372.36,−76.07 mm
真空容器的壳体材料均为 316 L 不锈钢,其物
性如表 2 所列。
表 2 316 L 不锈钢物性
Tab. 2 Characteristics of 316 L stainless steel
密度/ 弹性模量/ 屈服强度/ 许用应力/
泊松比
3
(g/cm ) GPa MPa MPa 图 3 远程位移施加
7.98 200 0.25 250 117
Fig. 3 Remote displacement application
当真空容器处于工作状态时,内筒与外筒间的 等效应力分析如图 4 所示,最大等效应力出现
夹层处于真空状态。在这里的真空容器工作状态 在箱体与外筒连接处,峰值为 196.55 MPa,大于材
仿真模型中,对真空容器内筒及外筒组成真空区域 料许用应力。此处由于容器结构不连续导致了应
−9
的表面施加 10 Pa 的压力,该区域可视作超高真 力集中,需采用应力线性化的分析方法进行强度校
[12]
空;对真空容器与外界接触的表面施加 0.103 MPa 核。参考钢制压力容器分析设计标准 ,将压力容
的外压载荷;采用四面体网格对真空容器进行网格 器中的应力进行分类,包括一次总体薄膜应力 P m 、
划分,网格单元大小设置为 30 mm,划分完成后,该 一次局部薄膜应力 P L 、一次弯曲应力 P b 、二次应
结构网格节点数为 148 258,单元数为 75 023。真空 力 Q 及峰值应力 F。应力评定准则如下:
容器网格划分如图 2 所示。根据实际工作情况,真 一次总体薄膜应力强度: P m ⩽ KS m;
空容器处于静止状态,主要通过外部向轴向室温孔 一次局部薄膜应力强度: P L ⩽ 1.5KS m;
施加约束,故在真空容器轴向室温孔处施加远程位 一 次 薄 膜 加 一 次 弯 曲 应 力 强 度: P L + P b ⩽