
Page 95 - 《真空与低温》2025年第5期
P. 95
634 真空与低温 第 31 卷 第 5 期
1.2.2 手动驱动 直方向拉力 F v 为机械臂随动阻力; F pm为楔块下底
当需要进行手动驱动时,航天员手动操作在轨 面与机架的摩擦力。楔块斜面的配合角 α为 7°。
可更换单元使在轨可更换单元侧锁紧/解锁单元侧 总的驱动力 F q 总 的需求为:
剪切销插入空间飞行器平台侧剪切孔锁紧楔组件 f x sinα+ f x cosα+ f p cosα− f p f x sinα
F q总 = F v (1)
剪切孔内。航天员在舱内或舱外使用电动工具或 cosα− f x sinα
手动转动通用工具驱动丝杠螺母副转动,完成锁紧 当 F v 为 30 N,配合角 α为 7°,斜面摩擦系数 f x
动作。解锁过程则相反。 为 0.3,平面摩擦系数 f p为 0.2 时。总的驱动力 F q 总
需求为 16.5 N,考虑系统裕度,单个锁紧点的驱动
2 关键参数设计
力设为 18 N。
根据空间站暴露载荷在轨承载需求,空间楔形 锁紧过程中,锁紧点的驱动力由在轨可更换单
自锁式重复锁紧机构必须满足以下几点要求: 元侧丝杠螺母副中间驱动锁紧/解锁单元的机架 a、
(1)锁紧机构必须保证在空间站在轨飞行阶段 机架 b 提供,如图 1 所示。机架 a、机架 b 由光轴
加速度、角加速度条件下能够承载 160 kg 的载荷, 导套导向进行直线运动,因此,丝杠螺母副的驱动
在锁紧状态下载荷适配器主被动端之间接触面角 力可等效为通过 4 个单独的直线导向机构传递。
度偏差不大于 0.1°,相对位置误差不大于 0.5 mm。 单个直线导向机构如图 4 所示,对机构进行受力分
(2)锁紧过程中需克服机械臂产生的 30 N 随动 析,可得丝杠螺母副的驱动力 F s 需求为:
阻力。 f F v + F q总
F s = (2)
(3)解锁后,分离所需作用力不大于 50 N、最 2 f B
1−
大力矩不大于 15 N·m。 L
(4)锁紧机构在−45~60 ℃ 真空环境下能可靠 式中:F s 为丝杠螺母副驱动力;B 为丝杠螺母副中
锁紧和解锁。 心轴线至光轴导套中心轴线距离;L 为光轴导套的
跨距;光轴导套的摩擦系数 f 为 0.2。为了校验空间
为此,机构的关键参数设计从锁紧/解锁单元
楔形自锁式重复锁紧机构的功能及性能,设计研制
锁紧驱动力设计和滑移面材料选择两方面展开。
了Ⅰ型和Ⅱ型两型尺寸不同的空间楔形自锁式重复
2.1 锁紧驱动力
锁紧驱动力直接决定了对电机最低输出扭矩 锁紧机构原型机。Ⅰ型 B 为 172 mm、L 为 108.5 mm
的需求,是锁紧机构的关键参数。在锁紧过程中, 时,F s 为 61.5 N;Ⅱ型 B 为 207 mm、L 为 136 mm 时,
通过机械臂操作使在轨可更换单元侧锁紧/解锁单 F s 为 57.5 N。
元剪切销 a、剪切销 b 和剪切销 c 分别插入平台侧 基于以上要求,选择丝杠螺母副输出的锁紧驱
剪切孔锁紧楔组件的精确定位圆剪切孔、抗剪腰 动力为 123 N,安全系数为 2。
形剪切孔和抗转腰形剪切孔中,接着机械臂切换随
F q总 F Y
动模式,再通过锁紧楔块 b 上部自锁斜面推动锁紧
F sm1 F vm F sm2
楔块 a 的自锁斜面实现锁紧。由于锁紧和解锁过 F v
程较缓慢,以准静态过程分析锁紧楔块 b 的驱动力,
F Y
L
其受力情况如图 3 所示。 B
F xm F v F x F s
α
F xm
F q F pm F h
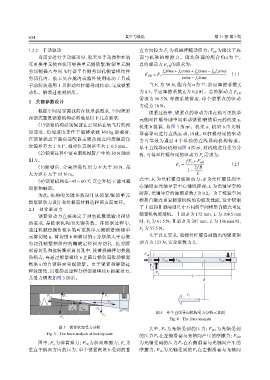
图 4 单个直线导向机构受力分析示意图
F v
F x
Fig. 4 The force analysis
图 3 锁紧状态受力分析 其中, F Y为光轴受到的压力; F sm1为光轴受到
Fig. 3 The force analysis at locking state 的压力 F Y在左侧滑套与光轴间产生的摩擦力;
F sm2
图中,F q 为弹簧弹力; F xm为斜面摩擦力;F x 为 为光轴受到的压力 F Y在右侧滑套与光轴间产生的
垂直于斜面方向的压力,单个锁紧楔块 b 受到的垂 摩擦力; F vm为光轴受到的 F v在左侧滑套与光轴间