
Page 93 - 《真空与低温》2025年第5期
P. 93
632 真空与低温 第 31 卷 第 5 期
空间站科学计划涉及空间科学的绝大部分领域,我 块承担垂直平面内的分离力、倾覆力矩;锁紧楔块 b
[5]
国规划了大批面向国际前沿的项目 。按照我国 的上表面与锁紧楔块 a 的下表面为摩擦自锁结构,
载人航天工程三步走战略,载人空间站实验舱Ⅱ以 实现振动、冲击载荷作用下 6 自由度的可靠锁紧
应用实验任务为主,实验舱Ⅰ兼有组合体控制任务 能力。为提高解锁可靠性,以丝杠螺母副为基础进
和应用实验任务两项功能,航天员在实验舱开展长 行解锁,丝杠一端采用输出力矩较大的电机组件进
[6]
期在轨驻留的空间应用和新技术实验 。舱外暴 行驱动,丝杠另一端预留手动工具操作接口,实现
露实验、在轨航天器或平台部件替换维修等任务 冗余驱动。
需要航天器舱外载荷适配器支持舱外载荷在轨安
锁紧楔块 b 平台侧剪切孔
装、拆卸,为舱外载荷提供通用化的机械、电能、 锁紧楔组件
[7]
信息、热控、流体等部分或全部接口 。随着空间 锁紧 1 2 载荷侧锁紧/
楔块 a 光轴 解锁单元
机械臂、航天员舱外活动(Extra Vehicular Activity, 抗剪腰形
EVA)技术的发展,通过机械臂或机械臂配合 EVA 剪切孔 机架 a 机架 b 手动操作口
剪切销 b
进行暴露载荷的安装和更换,极大地提高了舱外暴 电机组件
丝杠
露资源的利用效率和灵活性,但同时带来如无法精 精定位圆 螺母副 抗转腰形
剪切孔
确定位、驱动力不足等问题。机械臂的操作精度 剪切孔
剪切销 a 剪切销 c
有限,EVA 时存在操纵误差,导致载荷无法直接精
4 3
确定位。机械臂的功率限制及长臂结构的特性,造
成机械臂输出力有限。舱外活动时处于失重状态
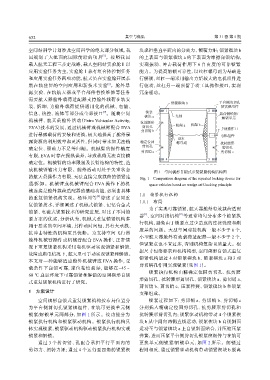
图 1 空间楔形自锁式重复锁紧机构结构图
的航天员操作力有限,无法直接完成载荷的锁紧连 Fig. 1 Composition diagram of the repeated locking device for
通/拆卸。机械臂或机械臂配合 EVA 操作下的机 space vehicles based on wedge self-locking principle
械连接是舱外载荷适配器的基础功能,必须由具体
1.1 锁紧执行机构
[8]
的重复锁紧机构实现。杨泽川等 综述了空间重
1.1.1 布局
复锁紧技术,详细阐述了机械式锁紧、记忆合金式
为了实现可靠锁紧,航天器舱外有效载荷适配
锁紧、电磁式锁紧技术的研究进展,对比了不同锁
[7]
[9]
器 、空间对接机构 等通常均匀分布多个锁紧执
紧方案的优劣,分析认为,机械式重复锁紧机构多
行机构,避免由于锁紧点过少造成的连接强度和刚
用于恶劣的空间环境,其作动时间短,具有大承载、
度差的问题。大型空间对接机构一般不少于 6 个,
抗冲击特性的机构更具优势。为支持空间飞行器
小型航天器舱外有效载荷适配器一般不少于 2 个,
舱外机械臂操作或机械臂配合 EVA 操作,正常情
但锁紧点也不宜过多,否则机构复杂且质量大。根
况下重复锁紧机构采用电机驱动实现锁紧和解锁,
据尺寸包络要求和机构构型,空间楔形自锁式重复
故障或断电情况下,航天员可手动实现锁紧和解锁。
锁紧机构通过 4 对锁紧楔块 b、锁紧楔块 a 和 3 对
本文对一种能够适应舱外机械臂或 EVA 操作,受
剪切销孔作用实现锁紧(见图 1)。
载条件下自锁可靠,定位精度良好,能够在−45~
锁紧执行机构由精确定位圆剪切孔、抗剪腰
60 ℃ 真空环境下可靠锁紧和解锁的空间楔形自锁
形剪切孔、抗转腰形剪切孔、锁紧楔块 a、剪切销 a、
式重复锁紧机构进行了研究。
剪切销 b、剪切销 c、压紧弹簧、锁紧楔块 b 和锁紧
1 方案设计
支架组成。
空间楔形自锁式重复锁紧机构按布局位置分 锁紧过程如下:剪切销 a、剪切销 b、剪切销 c
为平台侧剪切孔锁紧楔组件、在轨可更换单元侧 分别插入精确定位圆剪切孔、抗剪腰形剪切孔和
锁紧/解锁单元两部分,如图 1 所示。按功能分为 抗转腰形剪切孔内;锁紧驱动机构带动 4 个锁紧楔
锁紧执行机构和锁紧驱动机构。锁紧执行机构具 块 b 从中间向两侧直线运动,锁紧楔块 b 自锁斜面
体实现锁紧,锁紧驱动机构驱动锁紧执行机构实现 运动至与锁紧楔块 a 上自锁斜面贴合,并压缩压紧
锁紧和解锁。 弹簧,进而压紧平台侧剪切孔锁紧楔组件与在轨可
通过 3 个剪切销、孔配合承担平行平面内的 更换单元侧锁紧/解锁单元,如图 2 所示。解锁过
剪切力、扭转力矩;通过 4 个运行至四角的锁紧楔 程则相反,通过锁紧驱动机构带动锁紧楔块 b 脱离