
Page 94 - 《真空与低温》2025年第5期
P. 94
康 永等:空间楔形自锁式重复锁紧机构 633
锁紧楔块 a,剪切销 a、剪切销 b 和剪切销 c 分别脱 1.1.2 锁紧原理
离精定位圆剪切孔、抗剪腰形剪切孔和抗转腰形 锁紧由销孔定位抗剪、抗扭和楔块摩擦自锁
剪切孔,实现解锁和释放。 防分离两部分组成。
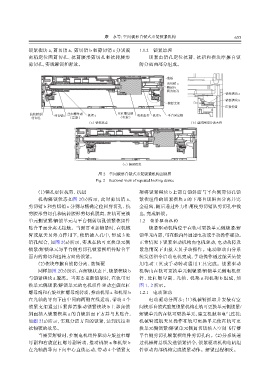
底板
剪切销 a
精定位
圆剪切孔
锁紧楔块 a
锁紧楔块 b
锁紧支架
压紧弹簧
抗转腰形 剪切销 c 丝杠螺母副 机架 a 丝杠螺母副 电机组件 机架 b 平台固定板
剪切孔 (左旋) (右旋)
(a)锁紧状态 (b)虚线圈部分放大图
(c)解锁状态
图 2 空间楔形自锁式重复锁紧机构剖视图
Fig. 2 Sectional view of repeated locking device
(1)销孔定位抗剪、抗扭 架将锁紧楔块 b 上部自锁斜面与平台侧剪切孔锁
机构解锁状态如图 2(b)所示,此时剪切销 a、 紧楔组件的锁紧楔块 a 的下部自锁斜面分离并完
剪切销 b 和剪切销 c 分别与精确定位圆剪切孔、抗 全退出,随后通过外力作用使剪切销从剪切孔中拔
剪腰形剪切孔和抗转腰形剪切孔脱离,在轨可更换 出,完成解锁。
单元侧锁紧/解锁单元与平台侧剪切孔锁紧楔组件 1.2 锁紧驱动机构
贴合平面分离无接触。当需要重新锁紧时,在机械 锁紧驱动机构位于在轨可更换单元侧锁紧/解
臂或航天员外力作用下,使销插入孔中,形成 3 处 锁单元内部,可在舱内外通过电动或手动操作驱动。
销孔配合,如图 2(a)所示,实现在轨可更换单元侧 正常情况下锁紧驱动机构由电机驱动,电动故障及
锁紧/解锁单元与平台侧剪切孔锁紧楔组件贴合平 紧急情况下由航天员手动操作。电动驱动由分系
面内的剪切和扭转方向的锁紧。 统发送指令启动电机完成,手动操作通过航天员使
(2)楔块摩擦自锁防分离、防倾覆 用电动工具或手动转动通用工具完成。锁紧驱动
同样如图 2(b)所示,在解锁状态下,锁紧楔块 b 机构由在轨可更换单元侧锁紧/解锁单元侧电机组
与锁紧楔块 a 脱离。当需要重新锁紧时,在轨可更 件、丝杠螺母副、光轴、机架 a 和机架 b 组成,如
换单元侧锁紧/解锁单元的电机组件驱动左旋丝杠 图 1、2 所示。
螺母副和右旋丝杠螺母副转动,推动机架 a 和机架 b 1.2.1 电动驱动
在光轴的导向下由中间向两侧直线运动,带动 4 个 电动驱动分两步:(1)机械臂抓取并安装有空
锁紧支架通过压紧弹簧推动锁紧楔块 b 上部自锁 间楔形自锁式重复锁紧机构在轨可更换单元侧锁紧/
斜面插入锁紧楔块 a 的自锁斜面下方并与其贴合, 解锁单元的在轨可更换单元,建立机械和电气连接;
如图 2(a)所示,实现分离方向的锁紧,达到抗拉和 机械臂或航天员操作在轨可更换单元使在轨可更
抗倾覆的效果。 换单元侧锁紧/解锁单元侧剪切销插入空间飞行器
当需要解锁时,控制电机组件驱动左旋丝杠螺 平台侧剪切孔锁紧楔组件剪切孔内。(2)分系统通
母副和右旋丝杠螺母副转动,推动机架 a 和机架 b 过机械臂总线发送锁紧指令,锁紧驱动机构电机组
在光轴的导向下向中心直线运动,带动 4 个锁紧支 件驱动内部机构完成锁紧动作。解锁过程相反。