
Page 65 - 《中国电力》2026年第5期
P. 65
唐佳杰等:考虑无人机恢复临时通信的有源配电网故障恢复策略 2026 年第 5 期
控制负荷的重要度确定恢复优先级,结合盲区范 开始
围和设备到达时间,确定无人机停靠点与数量。 读取配电网参数、光储与风储接入节点及出力、应
在满足时空约束下,派遣无人机建立临时通信网 急仓库位置、抢修队与无人机数量等信息,并输入
故障数据,完成初始化。
络。当盲区通信恢复后,区域电源可并网形成孤 划分信息盲区
非信息盲区内,优先利用具备黑启动能力的分布
岛并恢复负荷。 式电源形成孤岛恢复负荷;无法孤岛运行部分通过
网络重构恢复。
4)通信恢复后,再调度。在部分盲区通信恢
复后,调度具备孤岛运行能力的电源供电;对未 利用无人机进行分阶段通信覆盖
恢复区域继续通过网络重构优化,实现更大范围
在部分盲区通信恢复后,调度具备孤岛运行能力的
的供电恢复。 电源供电;对未恢复区域继续通过网络重构优化,
实现更大范围的供电恢复。
5)抢修优先级优化。在每次抢修前,模拟不
同线路修复后的负荷恢复量,量化比较确定抢修 每次物理故障抢修前先进行故障模拟抢修,确定抢修顺序
顺 序 。 每 次 恢 复 后 更 新 系 统 状 态 并 动 态 调 整 方
根据模拟故障抢修顺序进行物理故障抢修
案。当盲区内线路修复且断路器可闭合时,调度
无人机前往下一个盲区。
信息盲区物理故障 否
6)判断物理系统中失电负荷是否全部恢复, 全部抢修完成?
若全部恢复,则进一步安排抢修队以总抢修时间 是
最短为目标,确定剩余物理线路的抢修顺序,否 指导无人机前往下一个信息盲区建立临时通信网络
则,跳转到步骤 5)。
7)若故障线路全部修复,则灾后恢复结束; 故障负荷完全恢复? 否
否则返回步骤 6)继续执行。
是
考虑无人机恢复临时通信的有源配电网故障 以抢修时间最短为目标抢修
物理故障线路
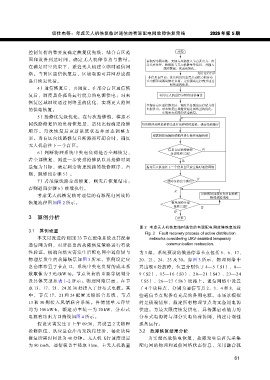
恢复流程图如图 2 所示。 物理故障全部
抢修完成? 否
是
3 算例分析 结束
图 2 考虑无人机恢复临时通信的有源配电网故障恢复流程
3.1 算例设置
Fig. 2 Fault recovery process of active distribution
本文以改进的 IEEE 33 节点配电系统及其配套 networks considering UAV-assisted temporary
通信网为例,对所提出的故障恢复策略进行有效 communication restoration.
性验证。极端自然灾害发生后配电网中通信层与 为 3 架,系统预设的候选停靠节点包括 5、6、17、
物理层发生的故障场景如图 3 所示。算例设定应 20、21、24、25 及 30。如图 3 所示,物理网络中
急仓库布置于节点 12,系统中失电负荷的成本系 共出现 6 处故障,位置分别位于 4—5(S1)、8—
数取值为 5 元/(kW·h)。节点负荷的重要等级划分 9(S2)、15—16(S3)、20—21(S4)、23—24
及具体类型如表 1~2 所示。物理网络层面,在节 (S5)、26—27(S6)线路上。通信网络中设置
点 13、17、21、24 及 30 处接入了分布式电源。其 了 4 个故障点,分别为通信节点 2、3、4 和 8,这
中,节点 17、21 和 24 配置光储联合系统,节点 些通信节点配备有充足的备用电源。本场景模拟
13 和 30 则接入风储联合系统。各储能单元容量 的是极端情形,假定所有物理节点均无备用电源
均为 100 kW·h,额定功率统一为 20 kW,分布式 供应。为最大限度恢复供电,具备黑启动能力的
电源有功出力日曲线如图 4 所示。 分布式电源将与部分失电负荷协同,构建计划性
假设灾害发生于上午 09:30,共设置 2 支物理 孤岛运行。
抢修队伍,从应急仓库出发执行任务,每处故障 3.2 故障恢复结果分析
修复所需时间设为 40 分钟。无人机飞行速度设定 为实现高效供电恢复,故障发生后首先采集
为 80 km/h,通信覆盖半径取 3 km,主无人机数量 配电网的物理和通信网络状态信息,采用融合孤
61