
Page 70 - 《振动工程学报》2026年第5期
P. 70
1274 振 动 工 程 学 报 第 39 卷
75
75
75
55
55
55
z / cm 35 z / cm 35 z / cm 35
15 15 15
−5 −5 −5
−10 15 −20 −10 0 10 20 −10 15 −20 −10 10 20 −10 5 20 35 15
y / cm x / cm y / cm x / cm y / cm
x / cm 40 40 0 −15 0
(a) 位于0.8 Hz的第一阶模态振型 (b) 位于2.5 Hz的第二阶模态振型 (c) 位于3.6 Hz的第三阶模态振型
(a) The 1st order modal shape at 0.8 Hz (b) The 2nd order modal shape at 2.5 Hz (c) The 3rd order modal shape at 3.6 Hz
75
75 75
55
55 55
z / cm 35 z / cm 35 z / cm 35
15 15 15
−5 −5 −5
−10 15 −20 20 −10 5 20 15 −10
y / cm
y / cm x / cm y / cm
x / cm 40 −10 0 10 x / cm 35 −15 0 5 20 35 50 −15 0 15
(d) 位于5.1 Hz的第四阶模态振型 (e) 位于6.0 Hz的第五阶模态振型 (f) 位于10.9 Hz的第六阶模态振型
(d) The 4th order modal shape at 5.1 Hz (e) The 5th order modal shape at 6.0 Hz (f) The 6th order modal shape at 10.9 Hz
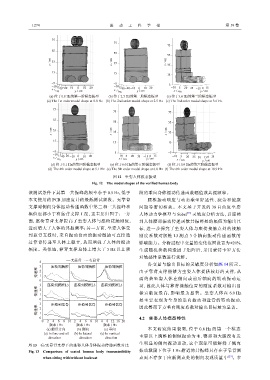
图 12 坐姿人体模态振型
Fig. 12 The modal shapes of the verified human body
该测试条件下其第一共振峰的频率小于 0.5 Hz, 低于 段的垂向身体振动传递函数幅值或共振频率。
本文使用的 PCB 加速度计的最低测试频段。无靠背 腰椎振动响应与动态乘坐舒适性、疲劳和健康
支撑时侧向身体振动传递函数中第二和三共振峰和 问题等密切相关。本文基于开发的 38 自由度坐姿
幅值也都小于有靠背支撑工况,这主要归因于:一方 人体动力学模型与 Sobel [33] 灵敏度分析方法,以座椅
面,座椅靠背支撑提高了坐姿人体与座椅接触刚度, 到人体腰部振动传递函数共振峰处的幅值为输出目
进而增大了人体的共振频率;另一方面,坐姿人体受 标,进一步探究了坐姿人体与座椅接触点处的接触
到靠背支撑时,来自振动台面的振动激励可直接通 刚度系数对腰椎 L3 测点 3 个轴向振动传递函数的
过靠背传递至人体上躯干,从而增强了人体的振动 影响能力。分析过程中变量的变化范围设置为±20%,
幅度。类似地,靠背支撑总体上增大了 5 Hz 以上频 生成随机参数构造因子矩阵后,采用蒙特卡罗方法
对敏感性系数进行求解。
4 无靠背 有靠背 各变量与输出目标的灵敏度分析如图 所示。
3 座椅到胸腔 座椅到胸腔 座椅到胸腔 14
传递率 2 1 由于靠背支撑能够为坐姿人体提供较好的支撑,从
0 而约束坐姿人体在侧向或前后轴向的转动振动运
3 座椅到腰椎L3 座椅到腰椎L3 座椅到腰椎L3 动,因此人体与靠背接触位置的刚度系数对输出目
传递率 2 1 标贡献度最高,影响最为显著。坐姿人体在 6.0 Hz
0 处主要表现为全身的垂向振动和盆骨的转动振动,
3 座椅到盆骨 座椅到盆骨 座椅到盆骨 因此臀部下方垂向刚度系数对输出目标最为显著。
传递率 2 1
0 4.2 坐姿人体模态特性
0 2 4 6 8 10 2 4 6 8 10 4 8 12 16 20
频率 / Hz 频率 / Hz 频率 / Hz
(a) 前后方向 (b) 侧向 (c) 垂向 本文研究结果表明,位于 0.8 Hz 的第一个模态
(a) In fore-and-aft (b) In lateral (c) In vertical
direction direction direction 主要以上胸椎的侧倾振动为主,臀部和大腿没有发
生明显的侧向振动运动,这个现象可能解释了侧向
图 13 有/无靠背支撑下的坐姿人体身体振动传递函数对比
振动激励下位于 1 Hz 附近的共振峰只存在于靠背测
Fig. 13 Comparison of seated human body transmissibility
when sitting with/without backrest 点而不存在于座板测点处的侧向表观质量中 [29] 。在